With the development of drone technology, communication technology, and network technology, the application of drones is becoming increasingly widespread, covering various fields such as industry, agriculture, telemetry, inspection, emergency response, firefighting, and military operations. In the military field, unmanned aerial combat platforms have become an important force for future operations, and collaborative combat among multiple drones will inevitably be a trend in future drone combat applications, playing an increasingly important role in warfare.The distributed, centerless IP network based on Ad hoc technology serves as the communication foundation for multi-drone collaborative combat, supporting rapid information exchange and sharing, achieving collaborative perception, collaborative processing, collaborative decision-making, and collaborative strikes, thereby greatly enhancing the survival capability and overall combat effectiveness of drones.

The development trend of drone communication networking will be based on Ad hoc technology as the basic network architecture. The U.S. Department of Defense specifically elaborated on this development trend in the “Unmanned Aerial Vehicle Development Roadmap” released in 2005, and this trend has been reiterated in subsequent versions. The reason the U.S. military places such importance on this is that the application of Ad hoc technology allows multiple drones to quickly form a distributed, centerless multi-hop routing relay self-organizing network, with self-organization, self-recovery, and high anti-destructive capabilities, greatly expanding the detection range of drone swarms and effectively enhancing their collaborative perception and information-sharing capabilities, thereby improving collaborative processing, collaborative decision-making, and collaborative strikes. The U.S. military has been leading in research and application in this field for many years. TTNT and its simplified evolved version QNT are tactical data links based on Ad hoc technology and IP architecture, demonstrating superior technical and tactical performance in aspects such as network scale, transmission rate, transmission delay, network scalability, and anti-jamming, forming a powerful operational coordination capability and greatly expanding operational styles. Relevant information shows that these two types of data links have been applied in areas such as drone collaboration, air-ground collaboration, machine-munition collaboration, munition-munition collaboration, X47B landing, and drone aerial refueling.
Here, Ad hoc technology is referred to as self-organizing network technology, and the multi-drone communication network based on self-organizing network technology is called drone self-organizing network. After nearly 20 years of research and practice by numerous domestic researchers, there are still not many practical applications of drone self-organizing network systems, for the following reasons: First, the high dynamic distributed characteristics of the network. The network topology is constantly changing, which poses significant challenges for distributed allocation of channel resources and rapid discovery and establishment of routing. Second, the limited availability of wireless channel resources. MAC protocols and routing protocols must improve channel resource utilization with minimal control overhead, effectively supporting dynamic allocation of wireless channel resources under conditions of late node entry and dynamic exit. Third, QoS assurance for data transmission. In the optimization design process of MAC and routing protocols in multi-hop self-organizing networks, ensuring that various services meet different requirements for transmission delay, transmission rate, and packet loss rate under multi-parameter and multi-objective optimization conditions is quite challenging. Fourth, the complexity of the electromagnetic environment in combat applications. Especially in electronic countermeasure environments with deliberate interference, the decline in communication link quality has a significant adverse effect on the overall performance of drone self-organizing networks, requiring physical layer communication waveforms and MAC protocols at the data link layer to cope with electromagnetic interference. Communication waveforms should generally employ anti-jamming techniques such as spread spectrum (frequency hopping, direct sequence) or intelligent frequency selection, as well as strong error correction coding capabilities to ensure communication link quality. Physical layer communication waveforms must be capable of recognizing the electromagnetic environment, MAC protocols must be able to recognize channel resources, and routing protocols must be able to recognize network topology, designing suitable anti-jamming technologies, channel resource allocation strategies, and routing strategies based on this recognition.
Key technologies for drone self-organizing networks, here focusing on the communication networking part of drones, excluding the payload task part at the application layer.
First, anti-jamming technology for physical layer communication waveforms. Military applications of drone self-organizing networks must be able to cope with complex electromagnetic environments, evade enemy interference, or eliminate adverse effects of interference on communication to ensure normal communication for friendly forces. Communication anti-jamming technologies mainly include spread spectrum technology and adaptive frequency hopping technology, where spread spectrum includes traditional frequency hopping, direct sequence, and spread spectrum techniques. In simple terms, frequency hopping means that all radios in the network synchronize their communication carrier frequency to jump according to a predetermined frequency hopping set controlled by a specific pseudo-random sequence to achieve anti-eavesdropping and anti-jamming communication. Adaptive frequency hopping employs cognitive radio technology to recognize interference at preset candidate frequency points and assess real-time communication quality; when the current working frequency point is interfered with and communication quality declines, it can quickly select the best frequency with minimal interference for communication. For self-organizing network systems, broadband high-speed frequency hopping must address the challenges of carrier synchronization, bit synchronization, and frame synchronization in traditional fully connected networks, as well as achieve full network time synchronization and frequency hopping pattern synchronization under multi-hop conditions, which poses significant technical challenges. For adaptive frequency hopping, real-time assessment of communication quality at preset candidate frequency points (channels) and how to quickly synchronize the entire network to switch to the best communication frequency when interference occurs are key technologies that must be solved for the application of drone self-organizing networks in the military field.
Second, MAC protocols at the data link layer. For drone self-organizing networks, this involves how to dynamically and rapidly allocate suitable channel resources to each node without a central coordinating node, achieving both fair and efficient access to limited channel resources while meeting low latency, high reliability, and high throughput goals. This is one of the key technologies and difficulties that drone self-organizing networks must overcome.
Third, routing protocols at the network layer. The high-speed movement of nodes in drone self-organizing networks leads to constantly changing network topologies. Designing a fast, efficient, scalable, and dynamically adaptable routing algorithm with excellent characteristics such as quick network entry, rapid routing switching, fast convergence, and low control overhead is another key technology and challenge that drone self-organizing networks must address.
Fourth, QoS technology. In the development process of existing self-organizing network radios, most have undergone cross-layer design, where the design of MAC protocols and routing protocols utilizes parameters such as physical layer signal strength indicators and bit error rates, and also integrates QoS and congestion control technologies from the transport layer, while employing various power-adaptive, modulation-adaptive, coding-adaptive, and rate-adaptive technologies to meet the different requirements of various services for delay, rate, and packet loss rate.

1. Explanation of Ad-Hoc Technology

(1) Overview
(2) Main Features
1. Distributed and Centerless. All radios are equal in status, with no central node. All nodes can join or leave the network at any time without affecting the robustness of the existing network.
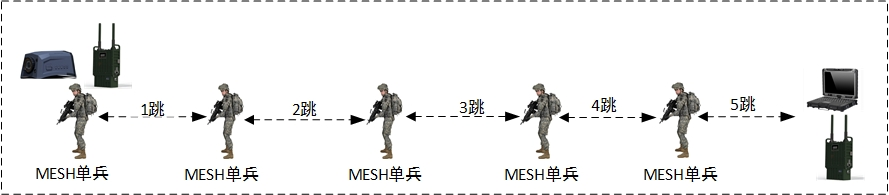
2. Multi-Hop Forwarding. All legitimate radios can automatically perform relay forwarding functions, expanding the network coverage.
3. Dynamic Topology. Supports dynamic routing topologies, suitable for scenarios where network connection topologies are constantly changing.
4. IP Transparency. Achieves IP transparency, converting all data information into IP format.
5. Broadband Transmission. Employs a multi-carrier approach to provide a broadband communication channel that meets the transmission needs of data, voice, images, and video.
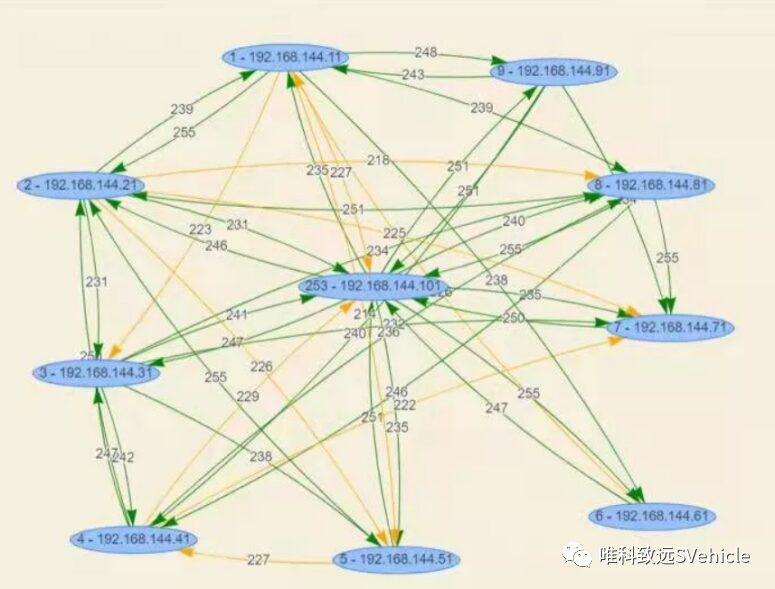

2. Visualization Self-Organizing Network Communication System Practical Case

 Network Diagram
Network Diagram (3) Device Configuration
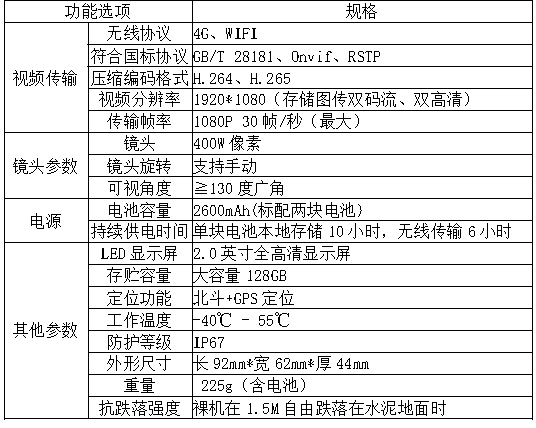
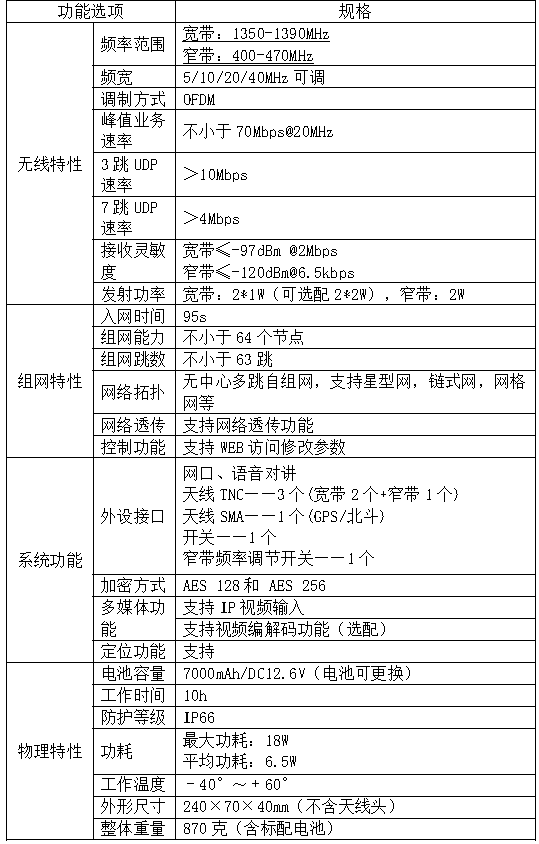
(3) Device Configuration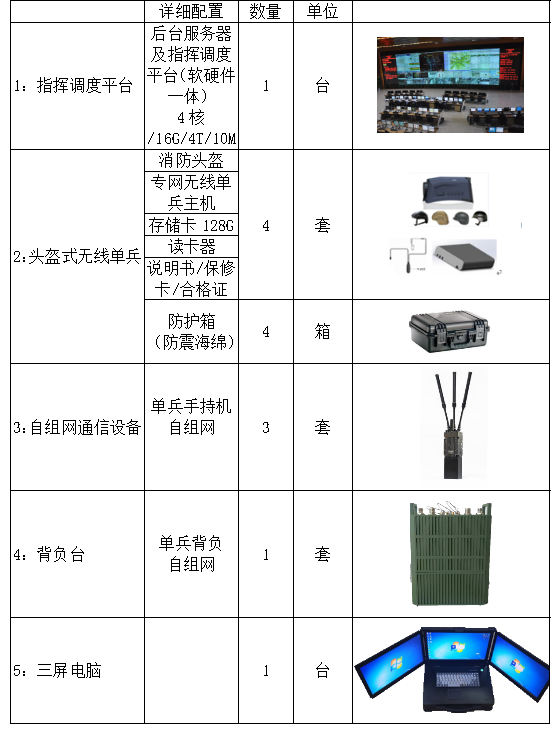





The following video is sourced from
North China Chuangxin