Raspberry Pi Bullseye 64-bit ROS Noetic V1.0 Desktop System Release
0x00 System Overview
The system released this time is based on the Raspberry Pi official Bullseye 64-bit system, with all ROS Noetic software packages compiled and installed using the latest source packages. Testing has shown that the Raspberry Pi’s 64-bit version of the system runs more smoothly than the 32-bit version.Currently, a total of 344 ROS software packages have been compiled and installed in the system, including the basic ROS runtime environment packages, SLAM navigation-related packages, cartographer-related packages, Moveit! robotic arm motion control-related packages, mavros flight control-related packages, and some other commonly used packages, basically ensuring that ROS development can be done out of the box.The difference in the ROS system compared to the 32-bit version melodic is that the Python version has been upgraded from Python 2 to Python 3, with the current default installed Python version being 3.9.2. Of course, it should also be noted that after upgrading to the latest 64-bit system, one of the most troublesome issues is that the current bullseye system has migrated the display driver to KMS, and is no longer the previously dedicated closed-source display driver, but this seems to cause the problem that the Rviz interface cannot be opened normally when connecting to the Raspberry Pi using VNC Viewer.
Currently, the Rviz interface can only be opened normally when an HDMI display is connected to the Raspberry Pi. I tried using the video-dummy module to simulate a configured virtual display, but the problem caused the CPU utilization to soar, leading to significant system lag, so I abandoned this approach. Therefore, I have not yet found a good solution to this problem, which will be addressed in subsequent versions.
At present, only Rviz cannot be opened normally, while other ROS tools can still be used normally in the remote desktop environment. Finally, the driver for accessing the camera module on the Raspberry Pi has now been replaced with the standard Linux API libcamera. Like the change in video drivers, this means less closed-source proprietary code, making the Raspberry Pi ecosystem more open.
The newly released system supports almost the entire series of Raspberry Pi development boards, including 3B, 3B+, 3A+, 4B, 400, CM3, CM3+, CM4, and Zero2W. Below you can see what the new version of the system looks like!
Bullseye 64-bit ROS Noetic System Desktop
View the release notes of the system
Check ROS running status
Check various tools under ROS rqt
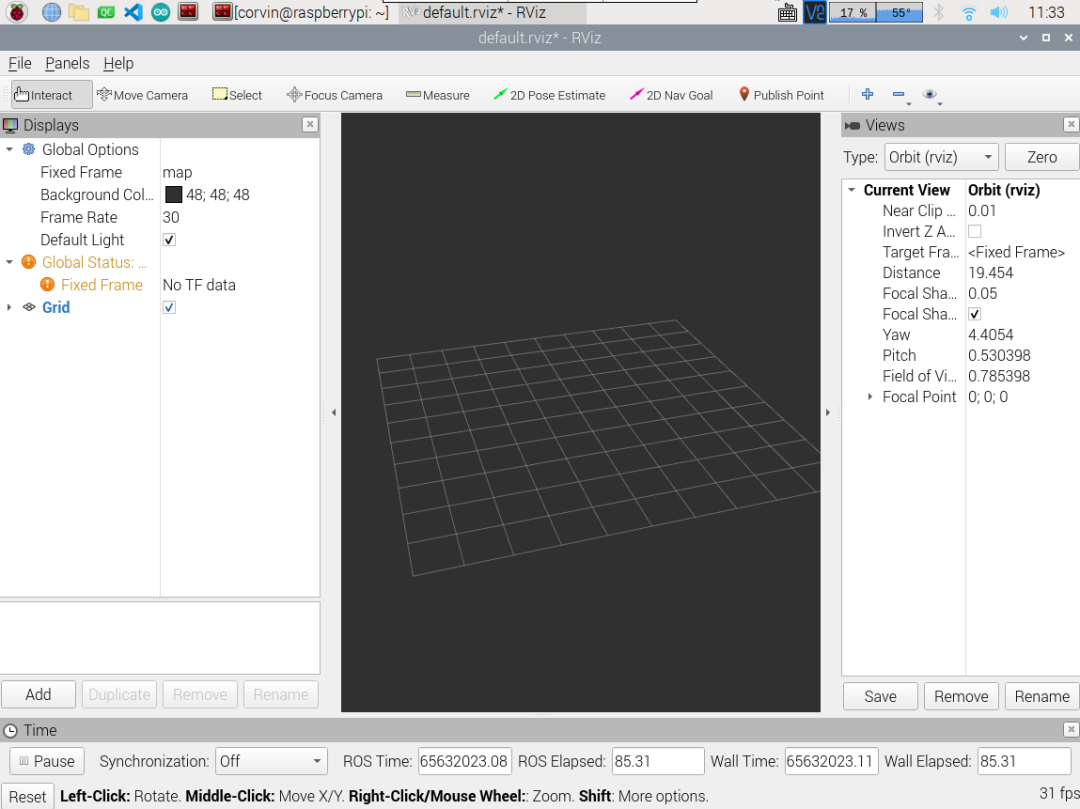
Rviz can be opened in the remote desktop after connecting an HDMI display
0x01 System Download
The system can be downloaded from Baidu Cloud, and everyone can download it for trial use first. If you are satisfied with the experience, you can purchase the system activation code for formal use. The trial use here only allows for 6 power on and off trials, and after the trial ends, the ROS-related functions in the system will stop working. The other functions of the Raspberry Pi will not be affected, and at this point, the system can be used as an ordinary Raspberry Pi official system. Baidu Cloud download link:
If you need to purchase the Raspberry Pi ROS system activation code, you can purchase it through the following link:
https://www.corvin.cn/cdkey-checkout
Activation code activation operation
0x02 System Testing
Basic operation introduction of the system
Cartographer mapping effect demonstration
Moveit running effect demonstration
0x03 Precautions
[1]. The Raspberry Pi system is the official 64-bit Bullseye system, which can run normally on Raspberry Pi 3B, 3B+, 3A+, 4B, 400, CM3, CM3+, CM4, and Zero2W.[2]. The default username for the system is corvin, and the password is also corvin. The password for the root user of the system is also corvin, and the default password can be modified by yourself.[3]. The system has already enabled the ssh-server on port 22, the vnc-server on port 5900, and the ftp service on port 21 by default, making it convenient for ssh connection, vnc remote desktop, and ftp connection.[4]. After the system is first flashed and started, it cannot correctly recognize the entire space of the SD card, and you need to use the Expand Filesystem tool in raspi-config to expand and recognize the entire SD card space.[5]. The MicroSD card requires a minimum capacity of 16GB, and 32GB space is recommended, as the system has already occupied about 12GB of space after flashing.[6]. In the current version, when using VNC Viewer in the remote desktop environment, the Rviz interface cannot be opened normally, which will be resolved in future version upgrades.