
Inspire the future from the heart
Creating the future with machinery, replacing manual with automation
Changing production methods, subverting people’s imagination
Trajectories connect the world, waterways lead to the future
June 28th, 9 AM
In the Electromechanical Building Hall
The Automation Department held a graduation design project exhibition
After three years of study, the seniors of the Automation Department
Have created many excellent works
Let us take a look back at
The outstanding graduation design works of the Automation Department

Part 1. Quadcopter DIY
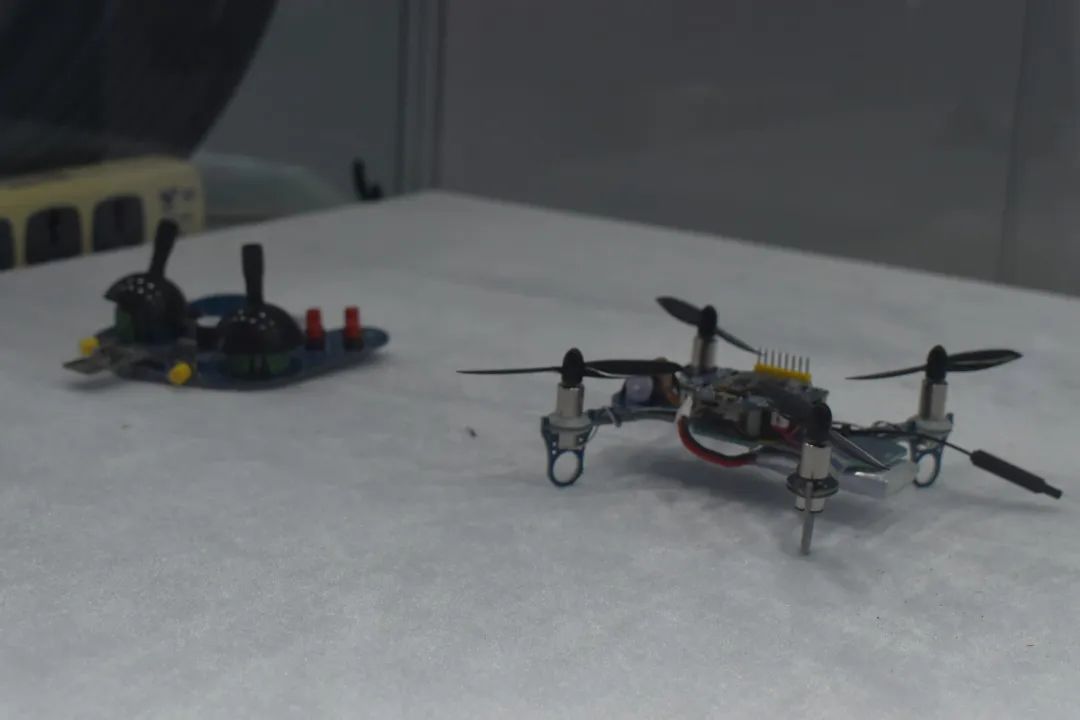
Student:Dai Jiawei
Instructor:Lin Shuguang
Function Introduction:
The quadcopter mainly includes the design of the remote controller and flight control,Both parts use the ARM Cortex-M3 core STM32F103C8T6 as the main processor. The quadcopter mainly consists of the main control chip, power circuit, communication, attitude control, motors, OLED display, and other modules.The flight attitude sensor uses the MPU6050 inertial measurement unit, which integrates a 3-axis gyroscope and a 3-axis accelerometer. The system communication part uses 2.4G wireless transmission, utilizing the NRF24L01 chip. It can achieve free flight of the quadcopter, with the upper computer or remote controller performing attitude fine-tuning.
Part 2. Simulated Electromagnetic Cannon
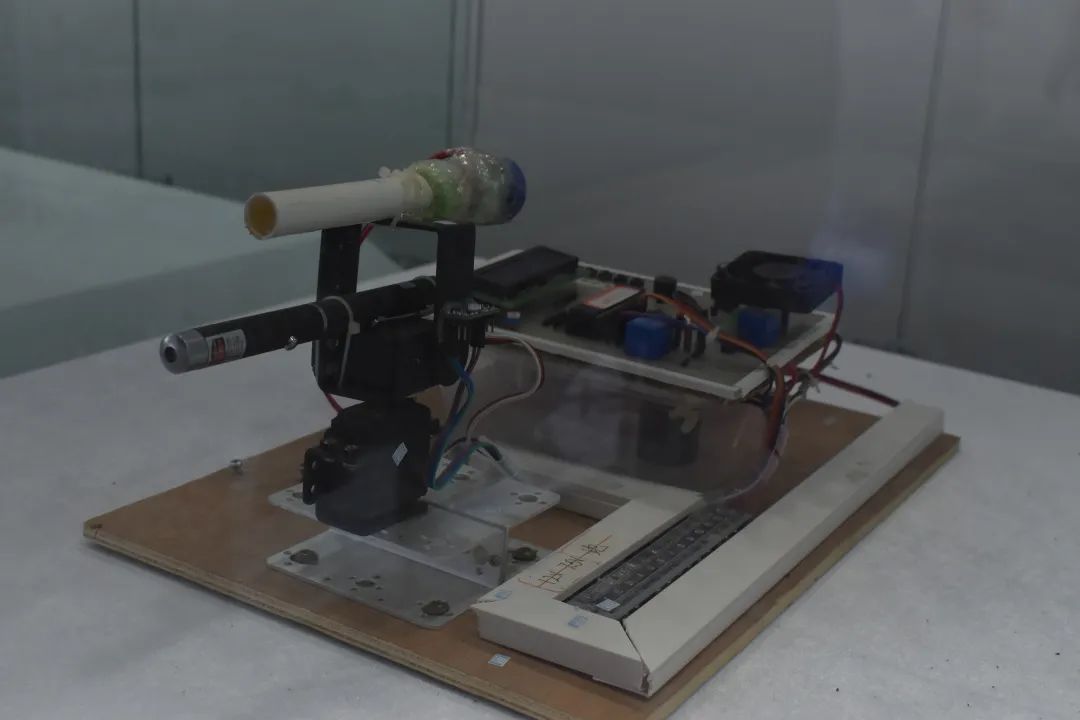
Students:Yao Junjian, Wu Zhiping, Ke Xiaoqiang
Instructor:Lin Hang
Function Introduction:
The simulated electromagnetic cannon consists of an intelligent control subsystem based on a microcontroller platform, related electronic circuit design, self-control program design, and structural design process. The cannon’s horizontal position and vertical elevation angle are adjustable, allowing preset distance and angle values to be input via buttons. The firing range is between 200cm to 300cm, with an actual measured target position error of less than 20cm. The electromagnetic force launches the projectile to hit the target circular target, with a firing cycle not exceeding 30 seconds.
Part 3. PLC Multi-Scene Parallel Control System

Students:Chen Maolin, Wu Zejin, Cai Chengxiong, Wang Wenjie
Instructor:Lin Hang
Function Introduction:
There are three interfaces, all of which can run independently or simultaneously in parallel, with output points on the PLC device being non-repetitive. Each window will automatically switch to the next if there is no operation within 60 seconds, and clicking on a blank window will reset the timer.
1. Push Box
The player uses the directional buttons on the MCGS touchscreen to operate. Before the game starts, the player must click on the Nezha icon on the touchscreen or the reset button on the keyboard to reset the timer.
2. Traffic Light
This module is used to demonstrate the traffic lights at a normal intersection, which can be operated using start and stop buttons.
3. Robotic Arm
This module has both automatic and manual modes. In automatic mode, the robotic arm’s operation can be controlled using start and stop buttons. In manual mode, click the manual switch on the keyboard, then use the function keys on the keyboard to operate.
Part 4. 16*16*16 Light Cube
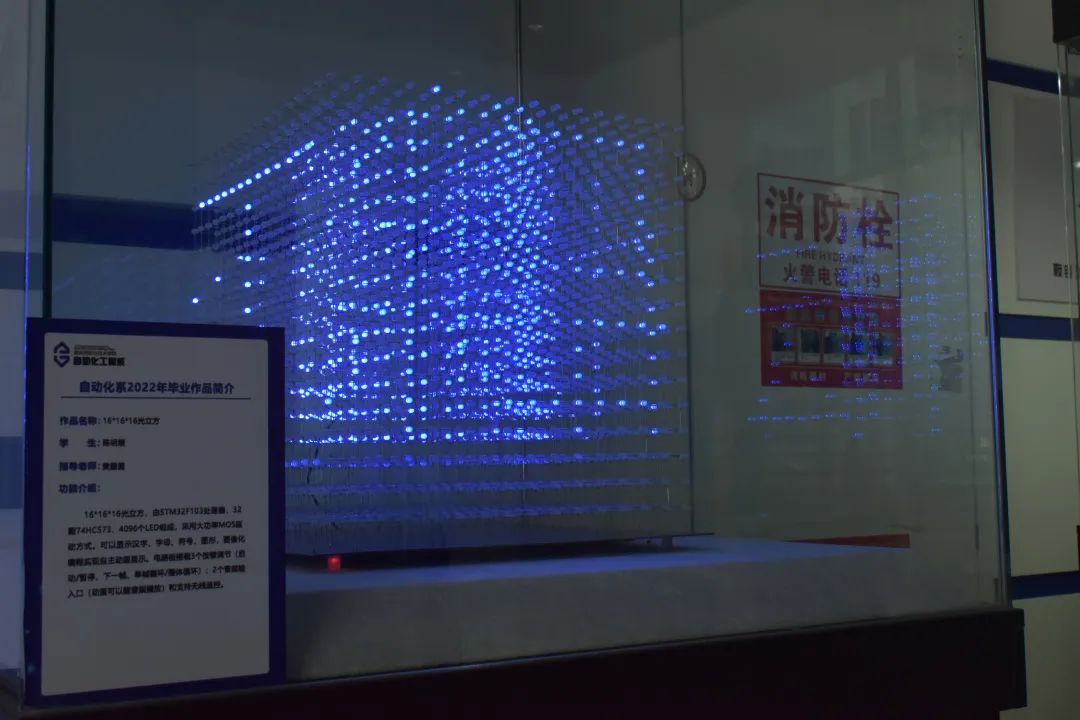
Student:Chen Mingyu
Instructor:Huang Pengyong
Function Introduction:
The 16*16*16 light cube consists of an STM32F103 processor, 32 74HC573 chips, and 4096 LEDs, using a high-power MOS driver. It can display Chinese characters, letters, symbols, and graphics, with visual programming to achieve autonomous animation display. The circuit board is equipped with 3 buttons for adjustment (start/pause, next frame, single frame loop/overall loop); 2 audio input ports (animations can play along with audio) and supports wireless remote control.
Part 5. Two-Wheeled Balancing Car
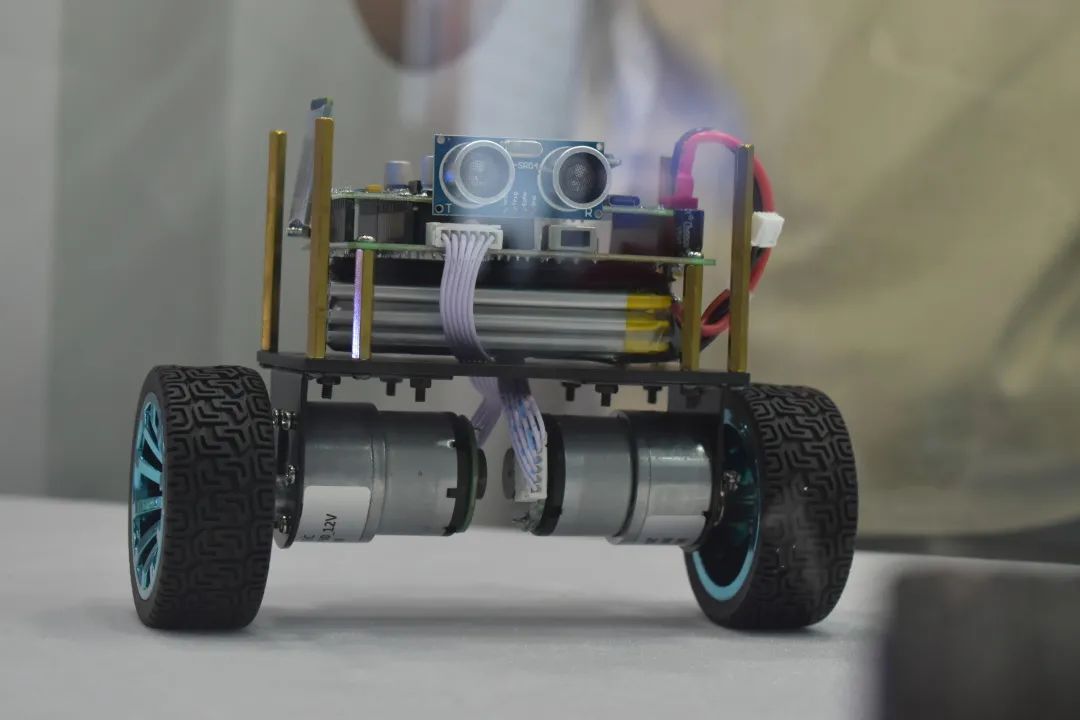
Student:Lin Jinxing
Instructor:Zheng Weiqing
Function Introduction:
The two-wheeled balancing car consists of an STM32 core board, AB programming, high-functionality DC motors, OLED display, attitude control, and other modules. It uses PID and LQR control algorithms, along with Kalman filtering attitude algorithms for automatic control of the car. The car operates in three modes: Normal, Ultrasonic Obstacle Avoidance (Avoid), and Ultrasonic Follow (Follow).
1. Normal Mode
When the motor is off, rotating the right wheel can select the mode. Hold the car upright on the ground, then click the user button, and the car will maintain balance.
2. Ultrasonic Follow Mode
Rotate the right wheel to select the follow mode, and move your hand or cardboard in front of the ultrasonic module. The car will follow the movement.
3. Ultrasonic Obstacle Avoidance Mode
Rotate the right wheel to select the ultrasonic avoidance mode. When there are obstacles in front of the car, it will move backward.
Part 6. Rainwater Rainfall and Liquid Level Detection Instrument
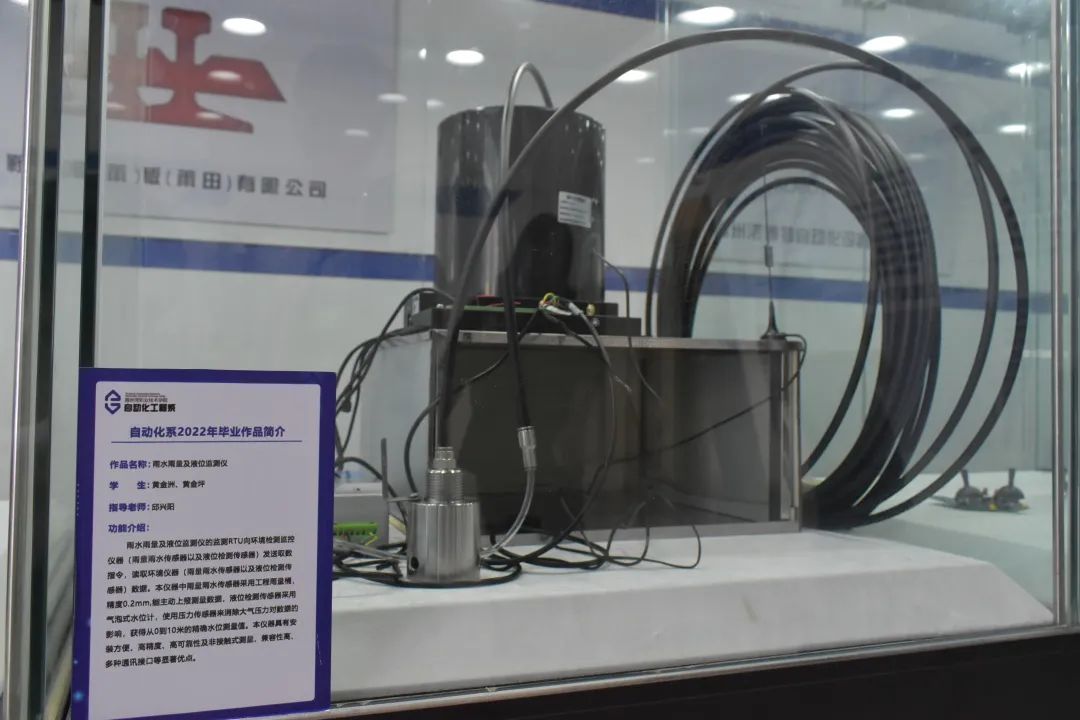
Students:Huang Jinzou, Huang Jinpeng
Instructor:Qiu Xingyang
Function Introduction:
The rainwater rainfall and liquid level monitoring instrument sends data retrieval commands to environmental monitoring instruments (rainfall and liquid level sensors). This instrument uses engineering rain gauges with an accuracy of 0.2mm, capable of actively reporting measurement data. The liquid level detection sensor uses a bubble-type water level gauge, employing pressure sensors to eliminate atmospheric pressure effects on data, obtaining precise water level measurements from 0 to 10 meters. This instrument features easy installation, high precision, high reliability, non-contact measurement, high compatibility, and multiple communication interfaces.
Part 7. 6-Degree of Freedom Robotic Arm

Students:Wu Haishan, Lin Junyi
Instructor:Qiu Xingyang
Function Introduction:
The 6-degree of freedom robotic arm consists of the STC15W4K series microcontroller, 6 LFD-06 anti-blocking digital servos, and a mechanical claw, capable of free rotation and grasping actions. It can also carry various foreign sensors for automatic sorting, color recognition, floor charging, light control, and sound control functions.
Control Methods:
PS2 wireless controller, mobile APP control, upper computer control
Part 8. Bionic Mechanical Hand
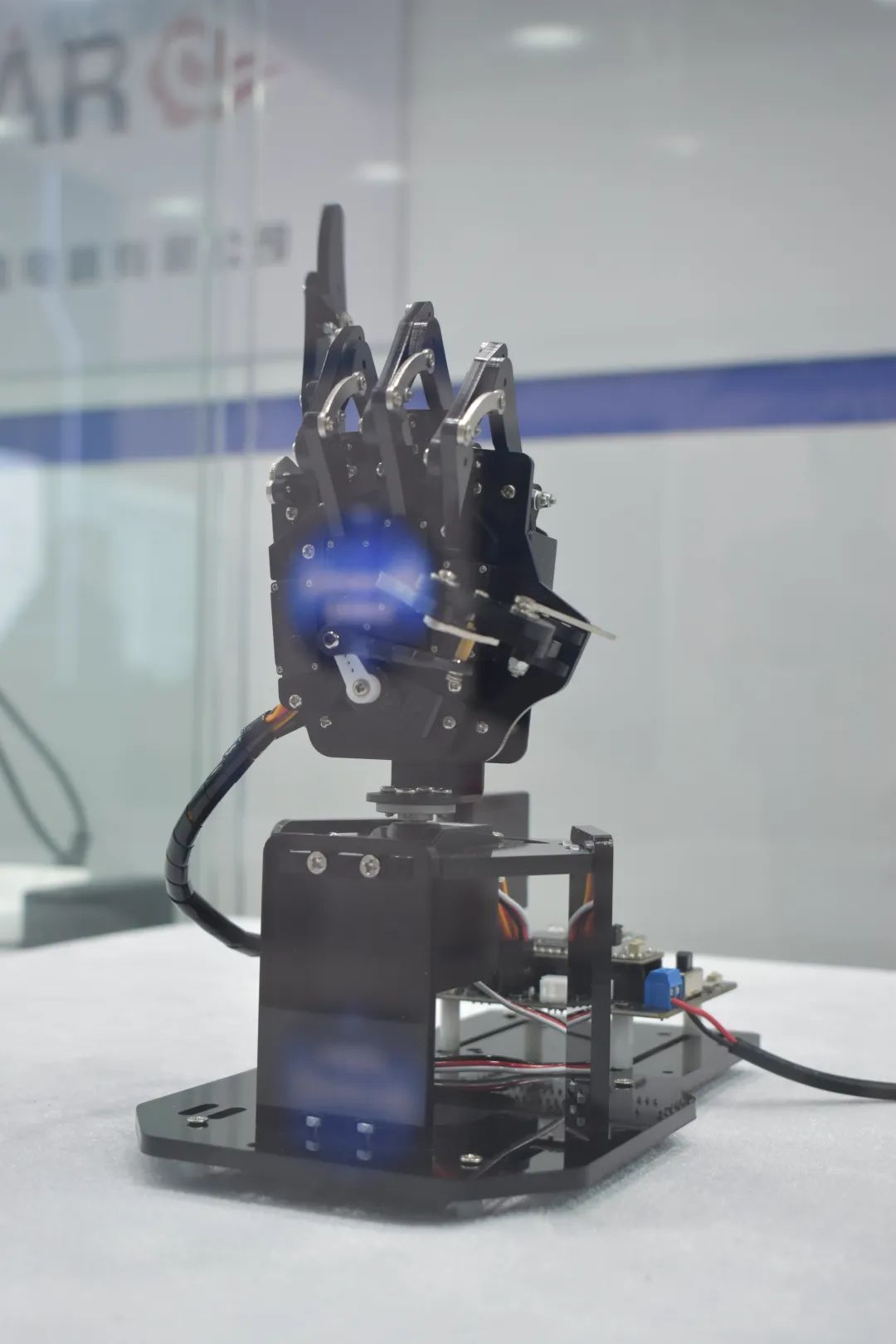
Student:Gao Mingjie
Instructor:Lin Shuguang
Function Introduction:
The bionic mechanical hand is developed and controlled using STM32, capable of freely controlling the opening and closing, direction, and force of five fingers, and can perform a complete set of actions based on a given algorithm. The five fingers are driven by five anti-blocking servos LFD-01, and the gimbal is driven by a 180-degree LD-1501 digital servo.
Control Methods:
PS2 wireless controller, mobile APP control, upper computer control
KLAIN BLUE






✦✦


✦
Student Reflections
✦
I think the automation project exhibition is a very good platform that allows us to gain a sense of achievement during the final display of our works, enhancing our interest in further research. My project is a simulated electromagnetic cannon, which I completed with another student under the guidance of Lin Hang. We only achieved basic functionality, and we will continue our research afterward. This exhibition allowed me to meet many excellent classmates around me, and I hope the Automation Department’s graduation design exhibition will continue to improve in the future!
——Electrical Automation 2002 Wu Zhiping
I would like to thank my instructor, Lin Shuguang, for recognizing my quadcopter DIY project for this graduation design exhibition. Participating in this exhibition made me feel once again that the people in our Automation Department are warm and approachable, and my classmates are talented and interesting. The site had both posters and dedicated personnel for recording interviews, and the feeling of being recognized after hard work is the best!
——Telecommunications 2001 Dai Jiawei
Being able to participate in the graduation design exhibition is also a perfect summary of my graduation project. Although there are many shortcomings, it gives me a point of reflection for my three years in college. At the graduation design exhibition, I saw many excellent works from other classmates, and I still need to continue to work hard. I hope that in future graduation design exhibitions, the juniors will have even better works and achievements; we cheer for you.
——Electrical Automation 2001 Chen Maolin
✦
✦
I hope every student in the Automation Department can have their own automation dreams, just like the seniors, to create their desired works. I also wish the graduating seniors a smooth journey in the future, and when they revisit this article, they can remember their youthful three years and their younger selves. Happy graduation!
• end •

Source: Meizhou Bay Vocational and Technical College, Department of Electronic Engineering

Previous Recommendations
Our college organized training and assessment for Red Cross first aiders

Party Building Leadership, Striving to be a Model Benchmark | Holding the Summary and Commendation Conference for the 2021-2022 Academic Year on Waste Classification

Graduation Commemorative Album | My Memories of Meiyuan