 Dian Dian Xia wants to learn about RTOS, but doesn’t know where to start, sigh.Real-Time Operating Systems? I’m familiar with them, let me explain slowly.
Dian Dian Xia wants to learn about RTOS, but doesn’t know where to start, sigh.Real-Time Operating Systems? I’m familiar with them, let me explain slowly. Ke Ke Jun
Ke Ke Jun
Real-Time Operating Systems (RTOS) are widely used in consumer electronics, entertainment products, home appliances, industrial equipment, medical instruments, military weapons, and scientific research equipment. They play a critical role in safety-critical fields such as aerospace control systems, automotive industry, banking and finance, robotic systems, security and telecommunications, and traffic control.
Dian Dian Xia The application fields are really broad, I also want to know what the key to learning RTOS is.That must be scheduling, scheduling, scheduling…Ke Ke Jun
RTOS must at least support priority preemptive scheduling, task synchronization and communication should avoid priority inversion, and provide high-precision timers. RTOS often runs on resource-constrained devices, where scheduling resource determinism and scheduling time determinism are important requirements, ensuring that system resources are used within a predetermined time.
Dian Dian Xia I understand a bit, Ke Ke, please continue.Next, we will explore priority-based preemptive scheduling.Ke Ke Jun
In our example, when a higher-priority task enters the ready state, the current task will stop running. This means a task can be in one of three states: running (executing), ready, and suspended. The behavior of tasks in preemptive scheduling can be described using the following state transition diagram.
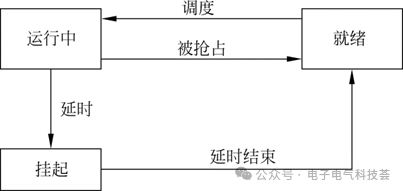
Dian Dian Xia So when is a task in the running state? When is it in the ready state?A task can only enter the running state when scheduled by the RTOS; before that, it must be in the ready state, and in a priority-based system, it must also be at the front of the ready queue.Ke Ke Jun
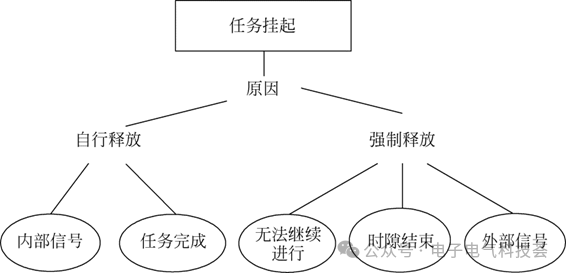
A task leaves the running state when it is suspended or preempted. When a task finishes execution or cannot continue for some reason, it will be suspended, for example, in this case, the task needs to delay for a specific duration. When a task enters the suspended state, it releases the processor’s control, allowing other tasks to run (see the diagram below). The release can be triggered by the task itself or enforced by the RTOS. A running task can release the processor in two ways: either the task completes the necessary operations and exits, or the task relinquishes control of the processor due to an internally generated signal (internal event).
The diagram below lists the reasons for forcibly releasing the processor.Ke Ke Jun
Dian Dian Xia Is there a task state model for reference?The diagram below is a general model of task states, and the detailed process is described below.Ke Ke Jun
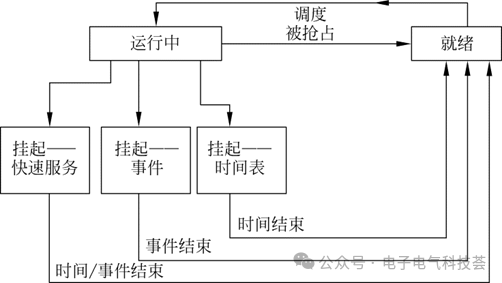
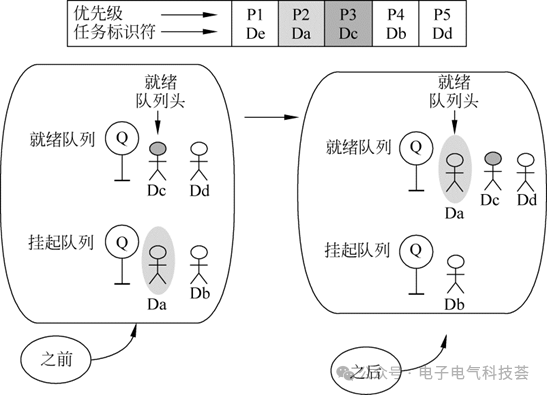
When preemption occurs, a task will be forced to relinquish the processor even if it has not completed, at this point the task is not suspended but will return to the ready queue. The position of the task in the queue is determined by its priority, and it will wait in the queue until the next scheduling. When conditions are met, the task will transition from the suspended state to the ready state, for example, after completing an event, after a specific time, or a combination of certain events and time. Different tasks have different suspended states.
Simple Example
If needed, the task model can be further expanded to show task creation and deletion. In a priority-based system, the readiness and rescheduling of tasks can become quite complex. The diagram below is a simple example that shows the impact of priority on the position of tasks in the ready and suspended queues, and how the ready queue changes when tasks become ready.
Dian Dian Xia I’ve learned a lot, but I still have a small question. Can you explain “rescheduling”?Rescheduling is the process of determining which task to run next, and can also be translated as re-scheduling.Ke Ke Jun
Table of Contents
Chapter 1 Basics of Real-Time Operating Systems
1.1 Background
1.2 Developing High-Quality Software
1.3 Software Modeling
1.4 Importance of Time and Timing
1.5 Handling Multiple Tasks
1.6 Complex Situations with Multiple Tasks
1.7 Interrupts as Execution Engines – Simple Quasi-Concurrency
1.8 Basic Functions of Real-Time Operating Systems
1.9 Execution Systems, Kernels, and Operating Systems
1.10 Task-Based Software Design – Review
1.11 Review
Chapter 2 Scheduling – Concepts and Implementation
2.1 Introduction
2.2 Simple Loop, Periodic Loop, and Cooperative Scheduling
2.3 Time-Slicing Scheduling
2.4 Task Priorities
2.5 Using Queues
2.6 Priority-Based Preemptive Scheduling
2.7 Implementation of Task Queues – Task Control Blocks
2.8 Process Descriptors
2.9 Ticks
2.10 Priority and System Response Speed
2.11 Bypassing the Scheduler
2.12 Code Sharing and Reentrancy
2.13 Unpredictability of Runtime Behavior
2.14 More Details on Tasks
2.15 Review
Chapter 3 Controlling Resource Sharing with Mutex Mechanisms
3.1 Problems in Shared Resource Usage
3.2 Implementing Mutual Exclusion with a Single Flag
3.3 Semaphores
3.3.1 Binary Semaphores
3.3.2 General or Counting Semaphores
3.3.3 Limitations and Defects of Semaphores
3.4 Mutexes
3.5 Simple Monitors
3.6 Overview of Mutual Exclusion Mechanisms
3.7 Review
Chapter 4 Resource Sharing and Contention Issues
4.1 Detailed Explanation of Deadlock Issues Arising from Resource Contention
4.2 Designing Deadlock-Free Systems
4.3 Preventing Deadlocks
4.3.1 Allowing Resource Sharing
4.3.2 Allowing Request Preemption
4.3.3 Controlling Resource Allocation
4.4 Priority Inversion and Task Blocking
4.4.1 Priority Inversion Issues
4.4.2 Basic Priority Inheritance Protocol
4.4.3 Immediate Priority Ceiling Protocol
4.5 Deadlock Prevention and Performance Issues
4.6 Review
Chapter 5 Inter-Task Communication
5.1 Introduction
5.1.1 Overview of Inter-Task Communication
5.1.2 Cooperation and Synchronization
5.2 Task Interaction without Data Transfer
5.2.1 Task Cooperation Mechanisms
5.2.2 Using Event Flags for One-Way Task Synchronization
5.2.3 Using Signals for Two-Way Task Synchronization
5.3 Data Transfer without Task Synchronization or Cooperation
5.3.1 Overview
5.3.2 Memory Pools
5.3.3 Queues
5.4 Task Synchronization with Data Transfer
5.5 Review
Chapter 6 Memory Usage and Management
6.1 Storing Digital Information in Embedded Systems
6.1.1 Introduction
6.1.2 Non-Volatile Data Storage
6.1.3 Volatile Data Storage
6.1.4 Simple Comparison of Memory Devices – Flash and RAM
6.1.5 Simple Comparison of Memory Devices – SRAM and DRAM
6.1.6 Embedded Systems – Memory Device Structures
6.2 Concepts and Implementation of Storage
6.3 Eliminating Interference Between Tasks
6.3.1 A Simple Method to Control Memory Access
6.3.2 Controlling Memory Access Using Memory Protection Units
6.3.3 Controlling Memory Access Using Memory Management Units
6.4 Dynamic Memory Allocation and Its Issues
6.4.1 Memory Allocation and Fragmentation
6.4.2 Memory Allocation and Leaks
6.4.3 Safe Memory Allocation
6.5 Memory Management and Solid State Drives
6.6 Review
Chapter 7 Multiprocessor Systems
7.1 What is an Embedded Multiprocessor
7.1.1 Why Use Multiprocessors
7.1.2 Overview of Processor Architectures
7.1.3 Multicore Processors – Homogeneous and Heterogeneous Types
7.1.4 Multi-Machine System Structures
7.2 Software Issues – Job Partitioning and Allocation
7.2.1 Introduction
7.2.2 Building Software as a Set of Functions
7.2.3 Building Software as a Set of Data Processing Operations
7.3 Software Control and Execution Issues
7.3.1 Basic Operating System Issues
7.3.2 Scheduling and Execution in AMP Systems
7.3.3 Scheduling and Execution in SMP Systems
7.3.4 Scheduling and Execution in BMP and Hybrid Systems
7.3.5 Comparison Between Multiprocessor Modes
7.4 Review
Chapter 8 Distributed Systems
8.1 Software Structure of Distributed Systems
8.2 Communication and Timing Issues in Distributed Systems
8.3 Mapping Software to Hardware in Distributed Systems
8.4 Review
Chapter 9 Analysis of Scheduling Strategies
9.1 Overview
9.2 Priority-Based Non-Preemptive Scheduling Strategies
9.3 Priority-Based Static Preemptive Scheduling Strategies – Overview
9.4 Priority-Based Static Preemptive Scheduling Strategies – Monotonic Rate Scheduling
9.5 Priority-Based Static Preemptive Scheduling Strategies – Heuristic Methods Combining Priority and Importance
9.6 Priority-Based Dynamic Preemptive Scheduling Strategies – Overview
9.7 Priority-Based Dynamic Preemptive Scheduling Strategies – Earliest Deadline Scheduling
9.8 Priority-Based Dynamic Preemptive Scheduling Strategies – Computation Time Scheduling
9.9 Priority-Based Dynamic Preemptive Scheduling Strategies – Idle Time/Slack Scheduling
9.10 Improving Processor Utilization – Rate Monotonic
9.11 Scheduling Strategies – Final Explanation
9.12 Scheduling Timing Diagrams – Symbol Overview
9.13 Review
Chapter 10 Operating Systems: Basic Structures and Functions
10.1 Background
10.2 Implementing Simple Multitasking via Interrupts
10.3 Microkernel
10.4 Minikernel
10.5 General Embedded RTOS
10.6 Review
Chapter 11 Performance and Benchmarking of RTOS
11.1 Overview
11.2 Measuring Computer Performance – Benchmarking
11.2.1 Overview
11.2.2 Computational Performance Benchmarking
11.2.3 Operating System Performance
11.3 Time Overheads in Processor Systems
11.4 Operating System Performance and Representative Benchmarks
11.5 Operating System Performance and Comprehensive Benchmarks
11.5.1 Overview
11.5.2 Basic Requirements
11.5.3 Testing Categories
11.5.4 Baseline (Reference) Test Data
11.5.5 Stress Testing Methods
11.6 Review
Chapter 12 Testing and Debugging of Multitasking Software
12.1 Scenario Introduction
12.2 Testing and Developing Multitasking Software – Professional Approaches
12.3 Testing in Target Machines – Practical Tool Functions
12.3.1 Overview
12.3.2 Testing RTOS Using Dedicated Control and Data Acquisition Tools
12.3.3 Testing RTOS Using On-Chip Data Storage Methods
12.3.4 Testing RTOS Using Host System Data Storage Facilities
12.4 Target System Testing – Practical Points
12.4.1 Introduction
12.4.2 Testing Concurrency of Individual Tasks
12.4.3 Implementing and Testing Concurrent Operations
12.5 Review
Chapter 13 Using RTOS in Critical Systems
13.1 Introduction to Critical Systems and Safety Integrity Levels
13.2 Operating System Issues
13.3 Issues and Remedies in RAM Usage
13.3.1 Overview
13.3.2 Memory Loss
13.3.3 Memory Exhaustion
13.4 Stack Usage
13.4.1 Stack Usage with Statically Allocated RAM
13.4.2 Improving Stack Reliability
13.5 Runtime Issues
13.5.1 Overview
13.5.2 Deadline and Response Time Issues
13.5.3 Reducing Interference Between Tasks
13.5.4 Handling Unpredictable Functional Behavior
13.6 Monitoring and Detecting Runtime Failures
13.6.1 Introduction to Watchdog Timers
13.6.2 Using WDT in Single-Task Designs
13.6.3 Windowed Watchdog Timers
13.6.4 Using WDT in Multi-Task Designs
13.7 Operating Systems and Critical Distributed Applications
13.8 Running Multiple Different Applications Through Time Partitioning
13.9 Design Guidelines
13.10 Review
Chapter 14 Conclusion
14.1 Tasks, Threads, and Processes
14.1.1 Overview
14.1.2 Program Execution in Embedded Environments – Introductory Guidance
14.1.3 Activities, Applications, and Tasks of Software
14.1.4 Concurrency Within Single-Processor Tasks
14.1.5 Running Multiple Applications
14.1.6 Summary
14.2 Comparison of RTOS and GPOS
Appendix A Important Infrastructure
A.1 Inter-Processor Communication
A.2 Graphical User Interfaces in Embedded Systems
A.3 Review
Appendix B Reference Guide
Appendix C Glossary of Abbreviations
Book Purchase Link
