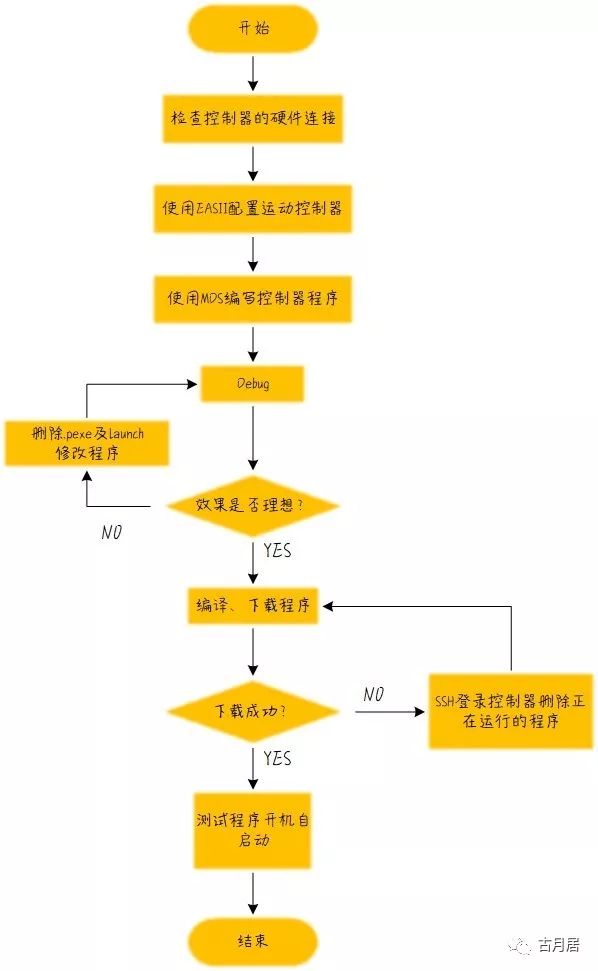
Controller Hardware Connection
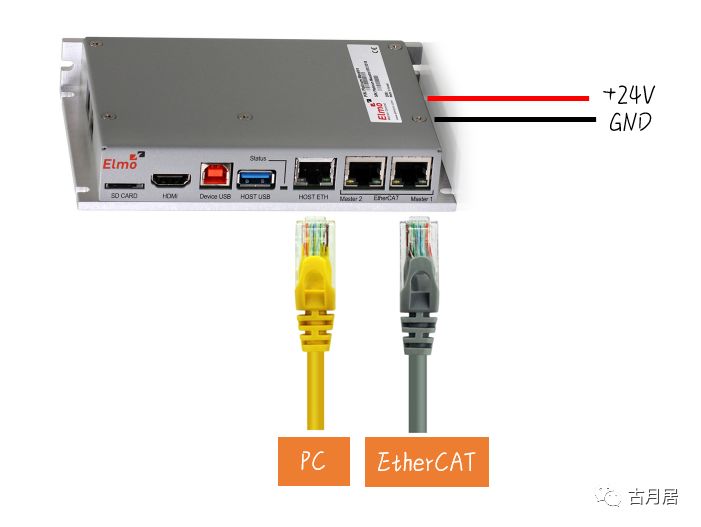
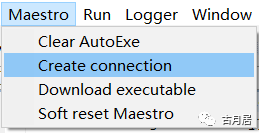
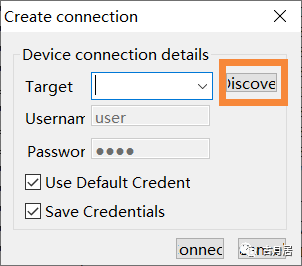
Communication Between Controller and PC
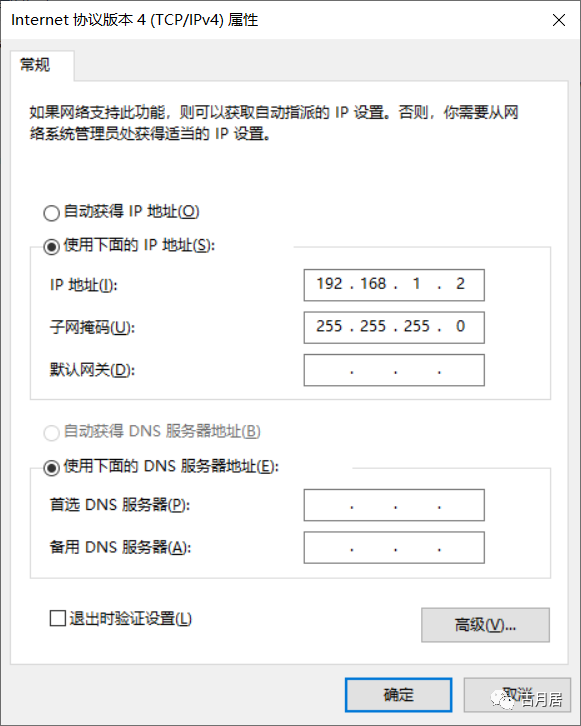
Tip

If unable to connect, check the IP settings and turn off the firewall.

If fewer devices are scanned than the actual hardware, it indicates a break in the bus loop; check the hardware connection.
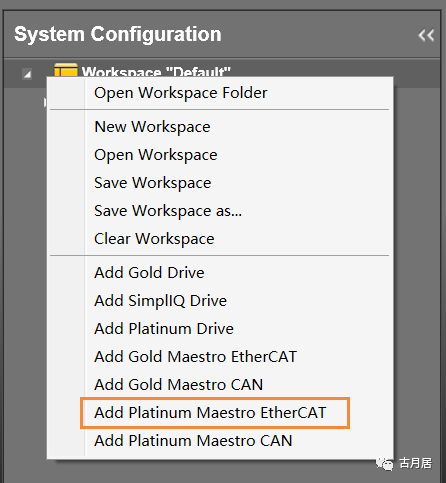
Programming and Management

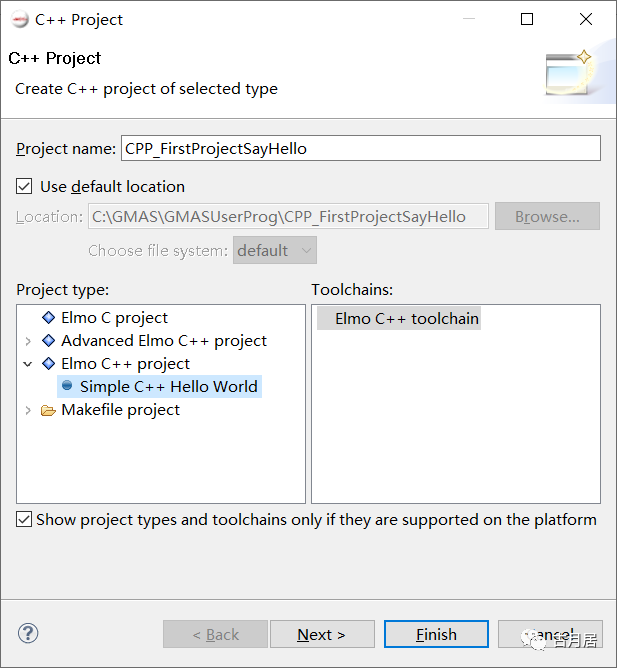
Creating a Project
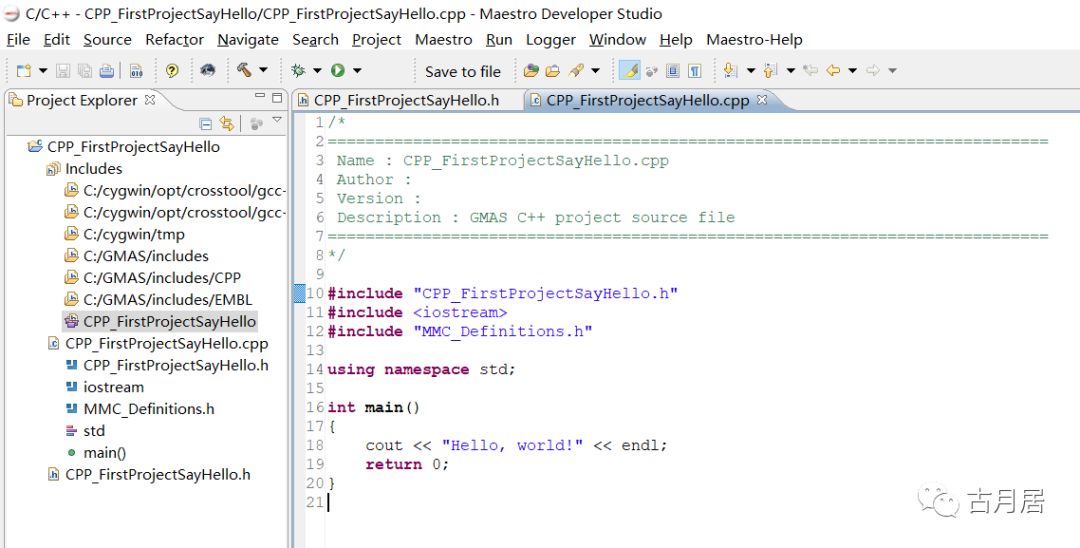
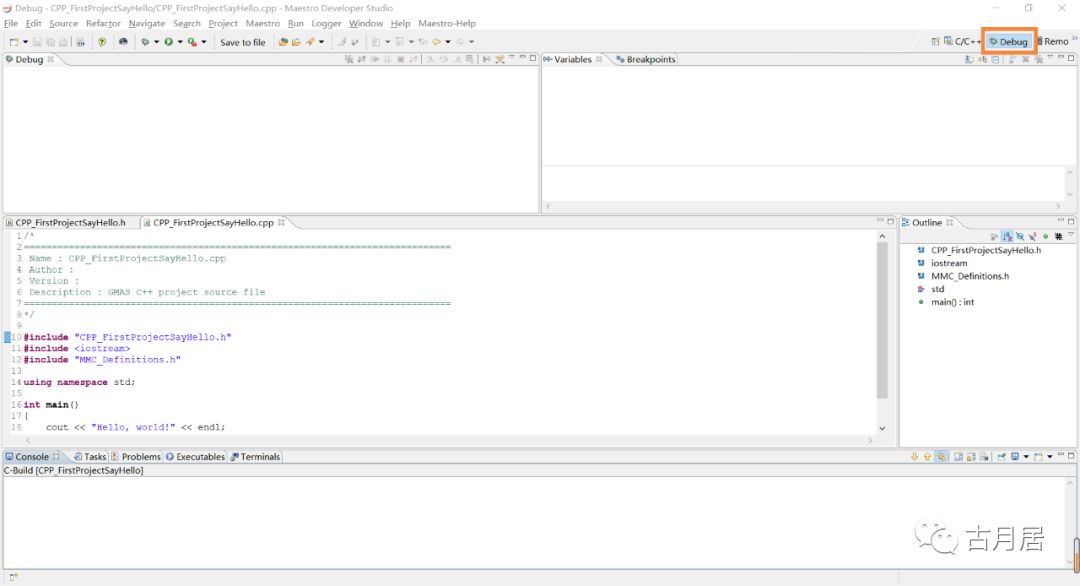
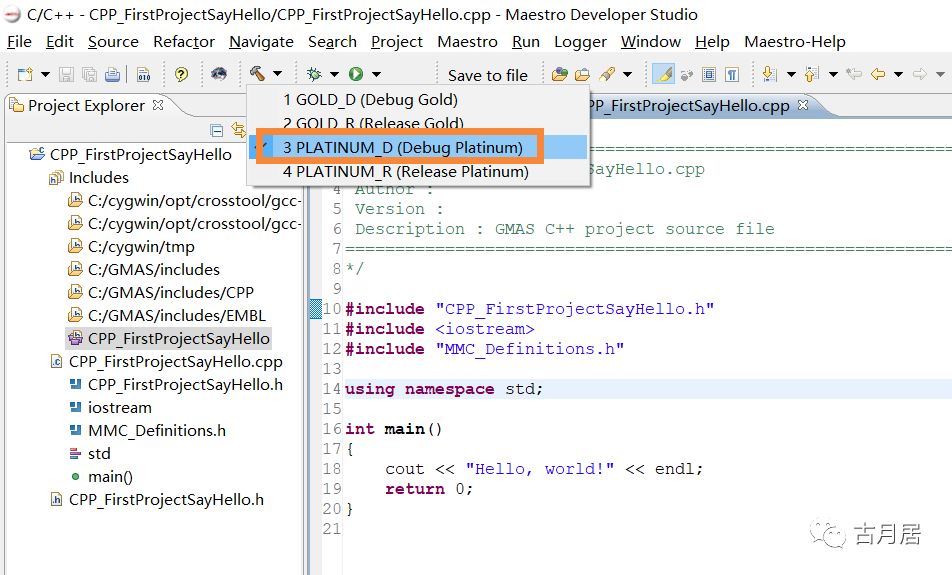
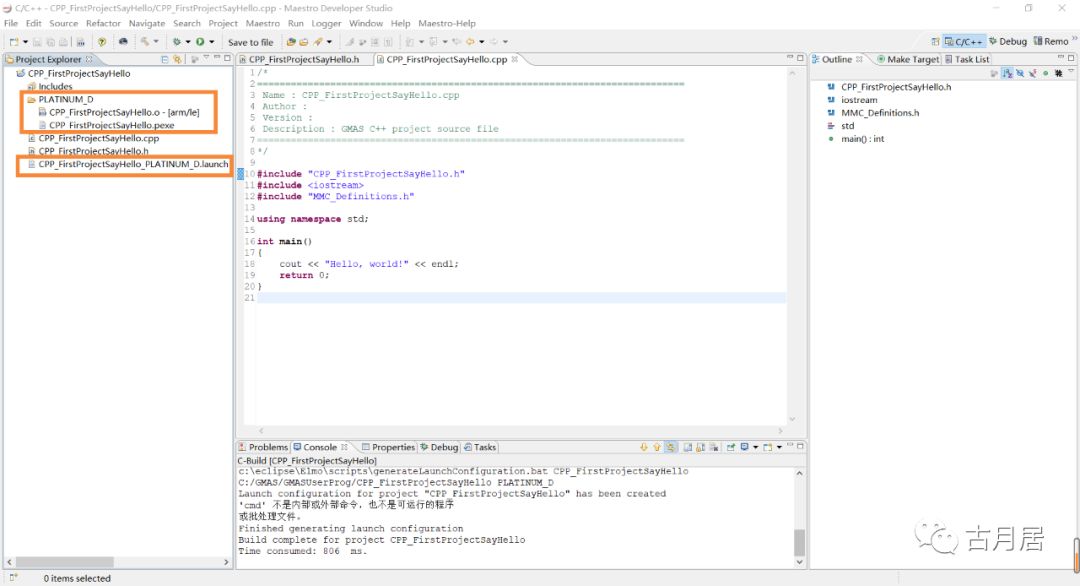
Debugging and Compiling the Program
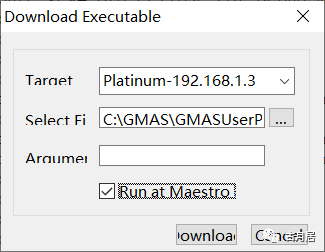
Downloading the Program
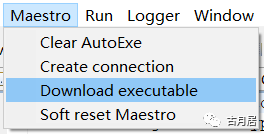
Tip

It is not recommended to use the “auto-start on power-up” feature for testing programs to avoid unexpected incidents caused by bugs.

Downloading a program while it is running is not possible; you must first delete the running program.
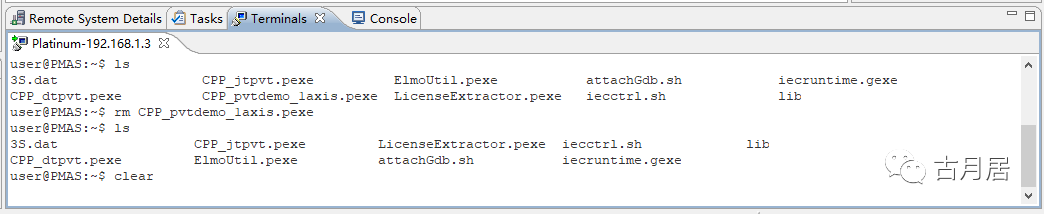
Managing Programs on the Controller
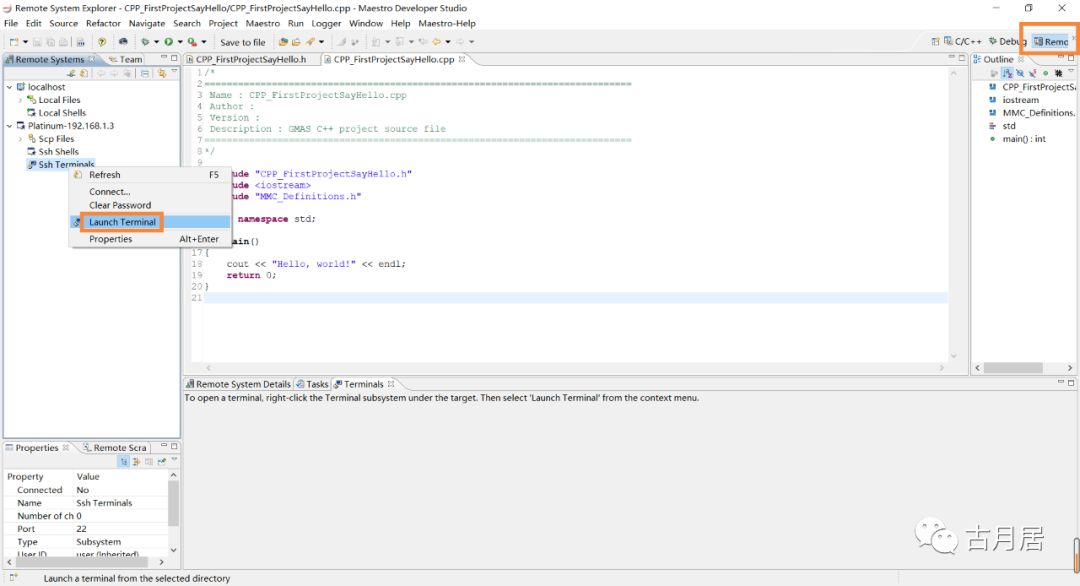
-
ls # List files in the current directory -
clear # Clear screen -
rm ***.pexe # Delete a specific executable program
Conclusion
-
Check if the power cable is connected correctly when powering on the controller. -
Use MDS software with administrator privileges and its default installation location. -
Check firewall settings if communication fails. -
When modifying the program after compilation, it is advisable to delete the generated PLATINUM_D folder and launch file first. -
It is not recommended to use the “auto-start on power-up” feature for testing programs to avoid unexpected incidents caused by bugs. -
Downloading a program while it is running is not possible; you must first delete the running program. -
Avoid operations beyond common operations, such as modifying other files, escalating privileges, and changing passwords to prevent system failures of the controller.
The Gu Yue Home original author signing plan has been launched, and the website (guyuehome.com) has launched the [Submission] feature. We welcome everyone to submit actively; authors of high-quality original articles will have the chance to become contracted authors at Gu Yue Home.
