
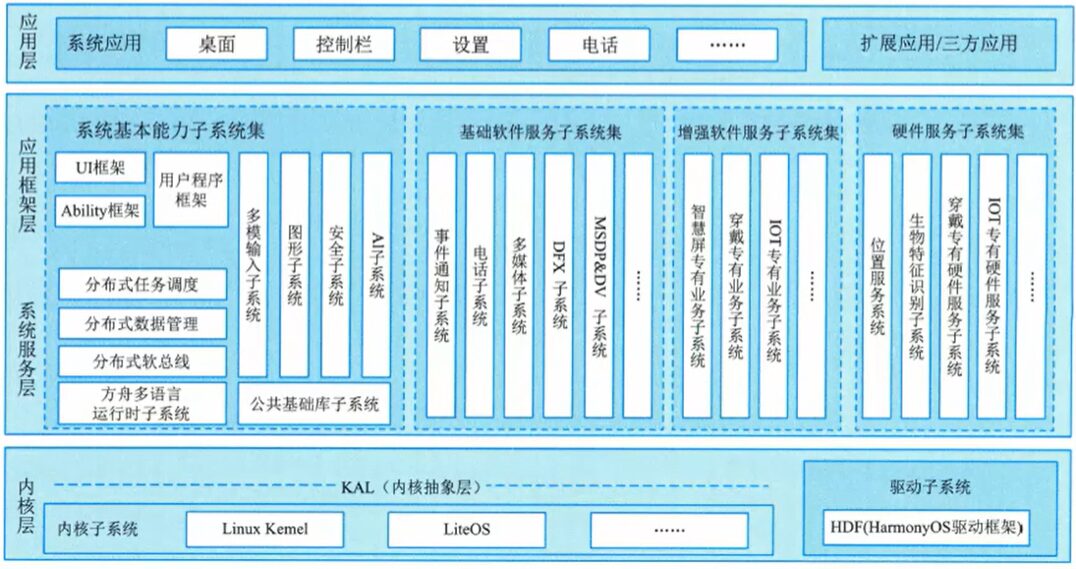
Analysis of HarmonyOS Architecture
-
Kernel Layer: Multi-core, selecting the appropriate OS kernel for different resource-constrained devices, masking multi-core differences.
-
System Service Layer: Core capabilities, providing services to application layer programs through the framework layer.
-
Application Framework Layer: Multi-language framework
-
Application Layer: System applications + third-party non-system application apps
The system functions are expanded step by step according to “System -> Subsystem -> Function/Module”. In multi-device deployment scenarios, it supports trimming certain non-essential subsystems or function/modules based on actual needs.
-
Basic Capability Subsystem: Provides basic capabilities for distributed applications to run, schedule, and migrate on HarmonyOS multi-devices.
-
Basic Software Service Subsystem: Common and universal.
-
Enhanced Software Service Subsystem: Differentiated capabilities for different devices.
-
Hardware Service Subsystem
Four Technical Features of HarmonyOS
-
Distributed architecture, first used in terminal OS, seamless collaboration across terminals.
-
Deterministic latency + high-performance IPC technology, making the system inherently smooth.
-
Microkernel
-
Unified IDE, develop once, deploy on multiple ends, sharing across terminal ecosystems.
Advantages brought by the distributed architecture
Distributed soft bus, a unified base for various terminal devices, interconnectivity between devices.
Distributed virtualization platform, achieving resource integration of different devices, matching and selecting suitable execution hardware.
Separation of business logic and data storage.
Distributed task scheduling.