If you don’t want to miss my updates, remember to click the top right corner – view public account – set as a star, and send me a star.
The project I am sharing today is an open-source project on Hackster, AI drone + roaming car, achieving intelligent precision agricultural control, using AI-driven drones and roaming cars to revolutionize sustainable agriculture with precise navigation control.
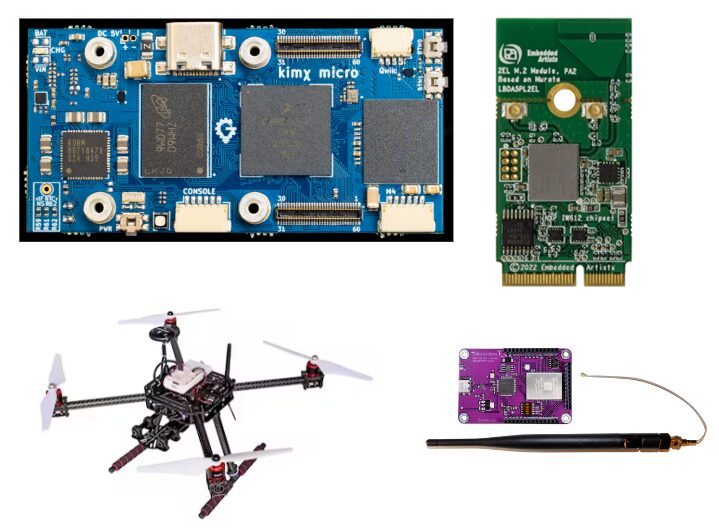
The hardware components used include:
-
Kimchi i.MX8M Mini Single Board Computer
-
WiFi HaLow Development Board TD-XPAH
-
Drone Kit – HGDRONEK66
-
Wi-Fi/BT IW612 m.2 Module Card
This innovative system uses AI-driven drones that can seamlessly communicate with remote ground roaming cars over long distances, without relying on existing infrastructure such as 4G or 5G cellular networks or satellite systems.
With long-range HaLow communication and open hardware drone control boards, it offers higher efficiency and precision as a replicable, low-cost, open solution for agricultural communication worldwide.
The system consists of a Hovergames high-altitude drone equipped with AI software, and is equipped with a Wi-Fi HaLow remote communication link that can operate over several kilometers in the 900 MHz frequency band.The drone uses AI image recognition algorithms to locate farmland while hovering and maps the direction and extent of crops within the farmland.
Then, the drone converts the row data into GPS coordinates and runs onboard path planning software. These GPS path coordinates are transmitted to a ground-based flow station. The drone monitors their progress as the rover traverses the farmland and updates their path planning in real-time.
The drone and rover system is controlled by a custom hardware system based on the Kimchi Micro i.MX8M Mini single-board computer.Built with open-source hardware and software, ensuring compatibility and support for the open-source community.The supported communication protocols include Wi-Fi 6E for long-range communication, Bluetooth and BLE, 802.15.4 Zigbee, and 802.11ah Wi-Fi Halow.
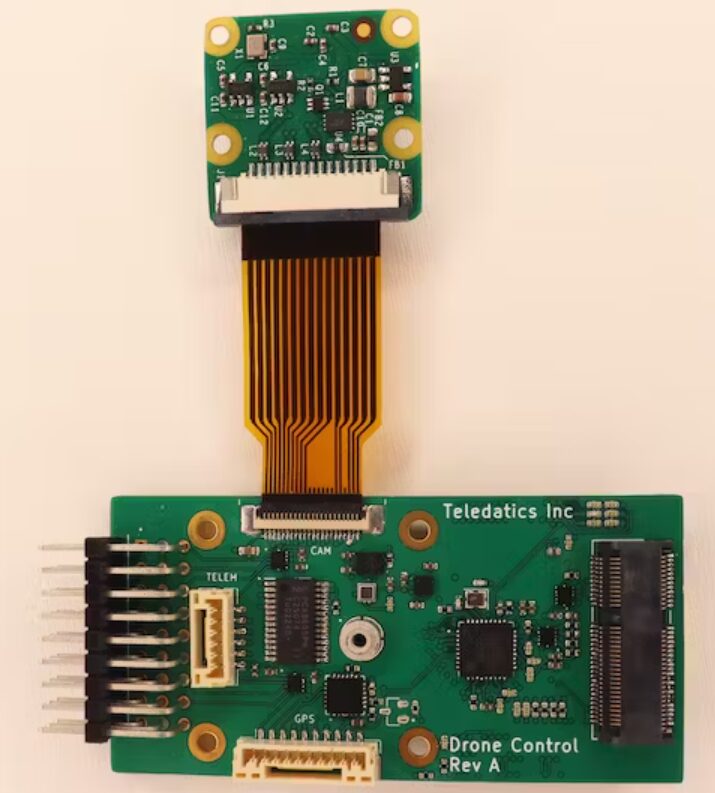
The hardware includes a custom sub-board from Kimchi, replicating PX4 hardware on the single board. It includes a Bosch pressure sensor, a magnetometer, an IMU, an NXP PWM chip for controlling the drone or rover motors, connections to external GPS and telemetry modules with the NXP kit, and a connector compatible with the Raspberry Pi HD camera.
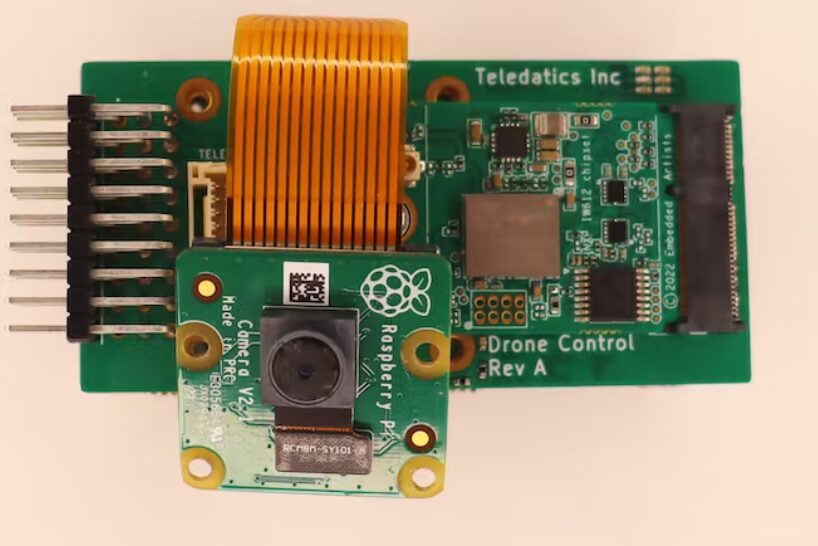
32mm*62mm*15mm Drone Control System
The drone control sub-board is designed in Kicad 7, and the hardware schematic download method is at the end of the article.
The drone control hardware is compatible with the NXP drone and rover kit. The telemetry and GPS connectors plug directly into the drone control sub-board, while the motors connect directly to the card, just as they currently connect to the NXP PX4 hardware.
The drone control hardware also includes:
A compact all-in-one solution for drone control runs PX4 Autopilot on the embedded ARM m4 CPU of the i.MX8M Mini SoC, with Linux and ROS2 running on the ARM A53 core. A Yocto version has been created, available on GitHub, that runs on Kimchi with the sub-board and HaLow mini-PCIe card, and an optional m.2 NXP IW612 card for Wi-Fi 6E, Bluetooth, and 802.15.4 communication.Download method for Yocto library files is at the end of the article..
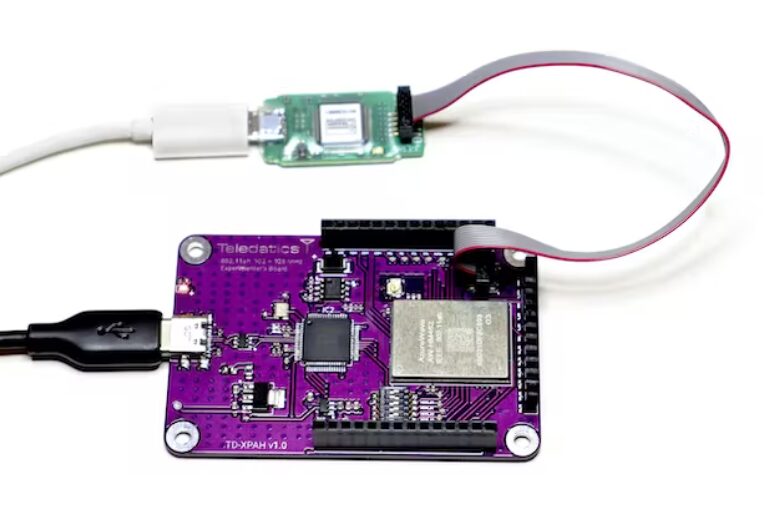
The NXP Hovergames rover with i.MX8M Plus SBC connects to the Teledatics TD-XPAH HaLow development board via a USB-C cable. TD-XPAH is a compact HaLow development board created by Teledatics that allows any Linux-based operating system to communicate using HaLow via USB.
The IW612 chip is a tri-band radio SoC that supports Wi-Fi 6E, Bluetooth 5.3, BLE, and Zigbee 802.15.4 wireless communication.
The machine learning software is designed to identify fields and rows, providing highly accurate GPS coordinates for flow station navigation, written in Python and running on the Jupyter notebook provided in the GitHub repo ai-drone-control.
The drone’s onboard AI engine uses this software to analyze farmland from above and sends path planning data to the flow station. The flow station uses the drone’s global path planning to determine the best patrol route and makes necessary adjustments for obstacle avoidance using SLAM algorithms. The software is divided into several parts:
1. Row Detection: Crop row detection algorithm utilizing novel statistical techniques.
2. Farmland Segmentation Net: Convolutional neural network for real-time identification and segmentation of crop fields.
3. Rover Path Planning: A collection of sub-modules that generate patrol routes for the flow station based on the drone’s field of view using the above modules and modern CV techniques.
4. Drone Control: Code for real-time control system of drone flight.
The project mainly relies on the IEEE 802.11ah HaLow communication standard to establish robust and reliable connections. The NXP flow station utilizes the Teledatics TD-XPAH module for HaLow communication via USB, while the Teledatics custom-designed mini-PCIe HaLow board integrates with the Kimchi SBC and open-source hardware drone control board.HaLow Wi-Fi protocol operates in the 900 MHz frequency band, supporting long-range TCP/IP connections covering several kilometers, allowing seamless communication between the onboard drone system and ground devices (such as NXP flow station kits).
The i.MX 8M Mini SoC has 4 A53 cores running Linux and an M4 core running PX4 Autopilot.We use the Linux operating system to load PX4 Autopilot. Related system loading, setup, etc., can be read in the original text below: https://www.hackster.io/jim-ewing/ai-drone-rover-coordination-for-precision-agriculture-cdda22
If you want to replicate this project, you can follow these steps:
1) Obtain the necessary hardware components, including the Hovergames drone and flow station kit, Kimchi Micro i.MX8M Mini SBC, and custom sub-board. These can be created from the open hardware GitHub repository or purchased from GroupGets or Teledatics.
2) Assemble the drone and flow station kit according to the provided instructions.
3) Download the Yocto repository from GitHub and set up the Kimchi SBC using the custom sub-board and HaLow mini-PCIe card.
4) Clone and install the machine learning software, PX4 Autopilot, and any other required software components from our GitHub repository.
5) Configure the drone and flow station to communicate using the HaLow wireless link according to the setup instructions provided in the Teledatics site documentation.
6) Fly the drone over the fields and verify that the flow station follows the generated GPS coordinates to test the system.
Original Link:
https://www.hackster.io/jim-ewing/ai-drone-rover-coordination-for-precision-agriculture-cdda22
Authors:Jim Ewing, Justin Carrel, Daniel Slater
1) Hardware Schematic: https://github.com/teledatics/drone-control-daughterboard
2) Yocto System: https://github.com/teledatics/drone-control-yocto
3) Machine Learning Software: https://github.com/teledatics/ai-drone-control
Project Sharing | Electric Competition Series | Artificial Intelligence | Postgraduate Entrance Examination
Must-Know Points | Graduation Design | Switching Power Supply | Job Search
We are Nimo, the founder of Darwin, a girl who only talks about technology and not flirting. The Darwin online education platform aims to serve professionals in the electronics industry, providing skill training videos covering popular topics in various subfields such as embedded systems, FPGA, artificial intelligence, etc. Tailored learning content is designed for different groups, such as commonly used knowledge points, disassembly assessments, electric competition/intelligent car/postgraduate entrance examination, etc. Welcome to follow us.
Official website: www.darwinlearns.com
QQ Group: Group 1: 786258064 (full)
Group 2: 1057755357 (full)
Group 3: 871373286