Author: Anticoder
Column: Optimazer’s Garden
https://zhuanlan.zhihu.com/p/59413549
Background: Focusing solely on a single model may overlook potential information that could enhance the target task from related tasks. By sharing parameters to some extent between different tasks, the original task may generalize better. Broadly speaking, as long as there are multiple losses, it counts as MTL, with some aliases (joint learning, learning to learn, learning with auxiliary tasks).
Objective: To enhance the model’s generalization and performance by balancing training information from the main task and related auxiliary tasks. From a machine learning perspective, MTL can be viewed as a form of inductive transfer (prior knowledge), which improves model performance by providing inductive bias (a certain prior assumption about the model). For example, using L1 regularization, we bias the model towards a sparse solution (fewer parameters). In MTL, this prior is provided through auxiliary tasks, which is more flexible and guides the model towards other tasks, ultimately leading to better generalization.
MTL Methods for DNN
-
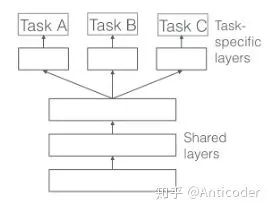
hard parameter sharing (this method is already 26 years old <1993>)
Share some parameters across all tasks (generally at the lower layers), while using unique parameters at the specific task layer (top layer). In this case, the risk of overfitting with shared parameters is relatively low (compared to non-shared parameters), with the risk of overfitting being O(#tasks). [1]
-
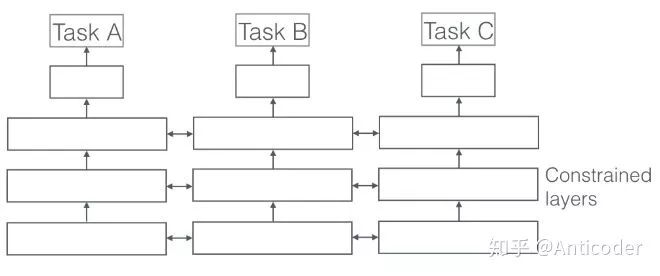
soft parameter sharing
Each task has its own parameters, and finally constraints are applied to express similarity by penalizing the differences between parameters of different tasks. For example, L2, trace norm, etc.
Advantages and Use Cases
-
implicit data augmentation: Each task has some sample noise, and different tasks may have different noise, ultimately learning from multiple tasks can cancel out some noise (similar to the idea of bagging, where noise exists in different directions and averaging will tend towards zero).
-
Some tasks with high noise or insufficient training samples and high dimensionality may not allow the model to learn effectively, or even learn relevant features.
-
Some features may be difficult to learn in the main task (for example, only existing in high-order correlations or suppressed by other factors), but can be learned well in auxiliary tasks. Auxiliary tasks can be used to learn these features, methods such as hints (predicting important features) [2]
-
By learning a sufficiently large hypothesis space, the model can perform well on some new tasks in the future (solving cold start), provided that these tasks are of the same origin.
-
As a form of regularization, constraining the model. The so-called inductive bias. Mitigating overfitting, reducing the model’s Rademacher complexity (the ability to fit noise, used to measure the model’s capability).
Traditional MTL Methods (linear model, kernel methods, Bayesian algorithms) mainly focus on two points:
-
Achieving sparsity between tasks through norm regularization
-
Modeling the relationships between multiple tasks
1.1 Block-sparse regularization (mixed l1/lq norm)
Objective: To force the model to consider only a subset of features, under the premise that different tasks must be related.
Assuming K tasks share the same features and the same number of model parameters, a matrix A (DxK) is formed, where D is the parameter dimension and K is the number of tasks. The goal is for these tasks to use only some features, meaning some rows of A should be zero. (The simplest idea is to make it a low-rank matrix; or use L1 regularization, as L1 can constrain certain features to zero. If we want to make certain rows zero, we can first perform a row aggregation operation and then apply L1 to the aggregated result, as detailed in article [3]. Typically, using lq norm to constrain rows (each feature) first, and then applying L1 norm for further constraints, is known as mixed l1/lq norm.
Development:
-
group lasso [4]: l1/l2 norm, solving the non-convexity of l1/l2 norm through trace norm; subsequently, an upper bound for using group lasso in MTL was proposed [5]
-
When there are few common features among multiple tasks, l1/lq norm may not perform as well as element-wise norm. A combination of these two methods has been proposed, decomposing the parameter matrix into A = S + B, applying lasso to S and l1/l_infinite to B. [6]
-
distributed version of group-sparse regularization [7]
2.1 Regularization for Learning Task Relationships
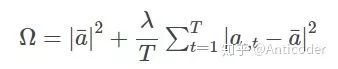
When the correlation between tasks is weak, using the above methods may lead to negative transfer (i.e., adverse effects). In this scenario, we hope to introduce prior knowledge that some tasks are related, while others are less so. This can be achieved by introducing task clustering to constrain the model. By penalizing the parameter vectors of different tasks and their variances, we can limit different models to converge towards their respective cluster mean vectors.
Similarly, in SVM, introducing Bayesian methods can pre-specify some clusters, aiming to maximize the margin while guiding different tasks towards their respective cluster centers; [8]
Once clusters are specified, clustering methods (intra-class, inter-class, and their own complexity) can be used to constrain the model.

In some scenarios, tasks may not appear in the same cluster, but there may be potential similar structures, such as group-lasso in tree-structured and graph-structured tasks.
2.2 Other Methods for Learning Task Relationships
-
KNN methods for task clustering. [9]
-
Semi-supervised learning for learning common structures of some related tasks. [10]
-
Multi-task BNN, controlling the similarity of multiple tasks through priors, with a complex model that can use sparse approximation to greedily select samples [11]; Gaussian processes can use the same covariance matrix and prior across different tasks (thereby reducing complexity) [12]
-
Using Gaussian priors for each task-specific layer, a mixture distribution of a cluster (predefined) can be used to encourage similarity between different tasks [13]
-
Furthermore, sampling distributions through a Dirichlet process can establish the similarity between tasks and the number of clusters. Tasks in the same cluster use the same model [14]
-
hierarchical Bayesian model, learning a latent task structure [15]
-
MTL extension of the regularized Perceptron, encodes task relatedness in a matrix. This can then be constrained through different regularizations (e.g., rank) [16]
-
Different tasks belong to different independent clusters, each cluster existing in a low-dimensional space, with tasks in each cluster sharing the same model. By alternating iterations, learning the distribution weights of different clusters and the model weights for each cluster. Assuming absolute independence between tasks may not be ideal [17]
-
Assuming there is overlap between two tasks from different clusters, there exists a portion of latent basis tasks. Let the model parameters for each task be a linear combination of the latent basis tasks, constraining the latent basis tasks to be sparse. The overlapping part controls the degree of sharing [18]
-
Learning a small set of shared hypotheses, then mapping each task to a single hypothesis [19]
MTL in DNN
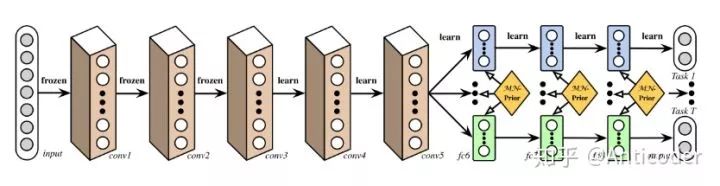
Deep Relation Network [20]
In computer vision, convolutional layers are generally shared, followed by task-specific DNN layers. By setting priors on the task layers, the model learns the relationships between tasks.
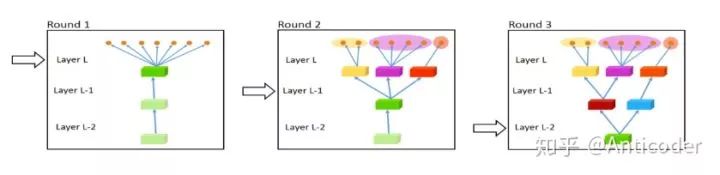
Fully-Adaptive Feature Sharing [21]
Starting from a simple structure, the model is greedily and dynamically widened, clustering similar models. Greedy methods may not learn the globally optimal structure; each branch for a task may not learn the complex relationships between tasks.
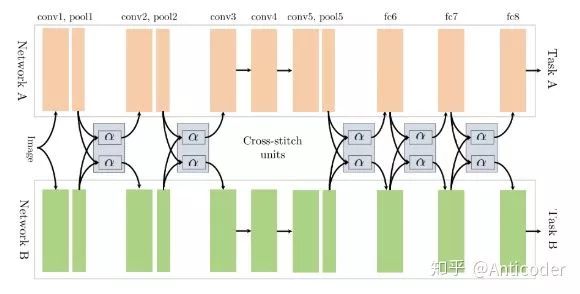
Cross-stitch Networks [22]
soft parameter sharing, through linear combinations of learning outputs from the previous layer, allowing the model to decide the degree of sharing between different tasks
Low supervision [23]
Finding better multi-task structures, the underlying complex tasks should be supervised by lower-level task objectives (for example, in NLP, the earlier layers learn an NER or POS auxiliary task).
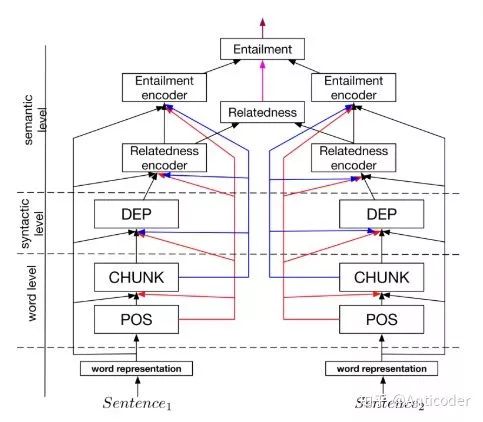
A Joint Many-task Model [24]
Pre-setting a hierarchical structure for multiple NLP tasks, followed by joint learning.
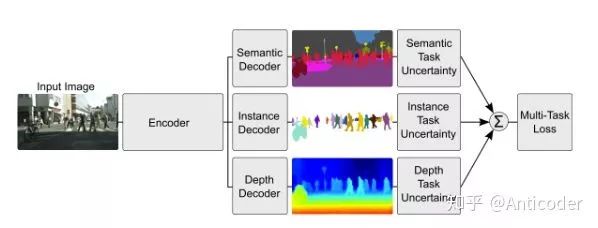
Weighting losses with uncertainty [25]
Not considering learning shared structures, but considering the uncertainty of each task. By optimizing loss (Gaussian likelihood with task-dependent uncertainty), adjusting the similarity between different tasks.
Tensor factorization for MTL [26]
Decomposing parameters for each layer into shared and task-specific.
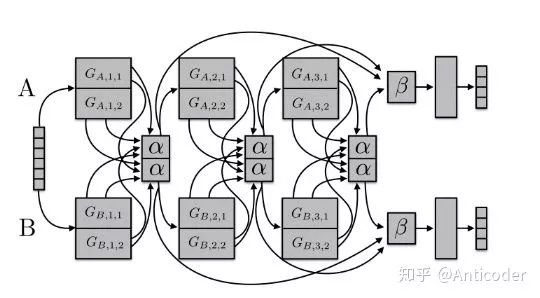
Sluice Networks [27]
A mix (hard parameter sharing + cross-stitch networks + block-sparse regularization + task hierarchy (NLP)) that allows the model to learn which layers and subspaces to share, and where the model finds the optimal representation of inputs.
When different tasks are highly correlated and approximately follow the same distribution, sharing parameters is beneficial. But what about tasks that are not highly correlated or unrelated?
Early work specified which layers to share for each pair of tasks, but this method has poor scalability and a severely biased model structure; when task correlations decrease or different levels of reasoning are required, hard parameter sharing becomes ineffective.
Currently, a hot topic is learning what to share (outperforming hard parameter sharing); also, learning task hierarchies is useful when tasks have multi-granularity factors.
Auxiliary Tasks
We focus only on the main task objective, but hope to benefit from other effective auxiliary tasks!
Currently, some methods for selecting auxiliary tasks include:
-
Related tasks: Conventional ideas (autonomous driving + road sign recognition; query classification + web search; coordinate prediction + object recognition; duration + frequency).
-
Adversarial: In domain adaptation, related tasks may not be accessible, and adversarial tasks can be used as negative tasks (maximizing training error), for example, an auxiliary task predicting the input domain, which leads the main task model to learn representations that cannot distinguish different domains.
-
Hints: Some features may be difficult to learn in certain tasks, selecting auxiliary tasks for predicting features (in NLP, the main task is sentiment prediction, and the auxiliary task is whether the inputs contain positive or negative words; the main task is name error detection, and the auxiliary task is whether there are names in the sentence).
-
Focusing attention: Making the model pay attention to parts that may not be easily noticed in the task (autonomous driving + road sign detection; facial recognition + head position recognition).
-
Quantization smoothing: In some tasks, the training objective is highly discretized (manual scoring, sentiment scoring, disease risk levels), using auxiliary tasks with less discretization may be helpful, as the smoother objective makes the task easier to learn.
-
Predicting inputs: In some scenarios, certain features may not be selected due to their adverse effects on estimating the target, but these features may help the model’s training. In such cases, these features can be treated as outputs rather than inputs.
-
Using the future to predict the present: Some features only become available after a decision is made, for example, in autonomous driving, data about objects is only obtained when the vehicle passes by them; in medicine, the effects of a drug are only known after it has been used. These features cannot be used as inputs but can serve as auxiliary tasks to provide information to the main task during training.
-
Representation learning: Auxiliary tasks often implicitly learn some feature representations, which to some extent benefit the main task. It can also explicitly learn this (using an auxiliary task that learns to transfer feature representations, such as AE).
So, which auxiliary tasks are useful?
The assumption behind auxiliary tasks is that they should be somewhat related to the main task, aiding in the learning of the main task.
How to measure the similarity between two tasks?
Some theoretical studies:
-
Using the same features for decision-making.
-
Related tasks share the same optimal hypothesis space (having the same inductive bias).
-
F-related: If the data for two tasks is obtained through a fixed distribution with some transformations [28]
-
Classification boundaries (parameter vectors) are close.
The similarity of tasks is not binary; the more similar the tasks, the greater the benefit. Learning what to share allows us to temporarily overlook theoretical shortcomings, as even tasks with poor correlations can still yield benefits. However, developing task similarity is absolutely helpful in selecting auxiliary tasks.
MTL Learning Tips
-
Auxiliary tasks with compact and uniformly distributed labels are better (from POS in NLP) [29]
-
The main task training curve stabilizes faster, while auxiliary tasks stabilize more slowly (not yet stabilized) [30]
-
Different tasks may have different scales, the optimal learning rate for tasks may differ.
-
Outputs from one task can serve as inputs for other tasks.
-
Some tasks may have different iteration cycles, requiring asynchronous training (posterior information; feature selection, feature derivation tasks, etc.).
-
The overall loss may be dominated by certain tasks, necessitating dynamic adjustments to parameters throughout the cycle (by introducing some uncertainty, each task learns a noise parameter, unifying all losses [31]).
-
Some estimates can serve as features (alternating training).
Summary
Hard parameter sharing, which is over 20 years old, is still popular, and the current hot topic of learning what to learn is also valuable. Our understanding of tasks (similarity, relationship, hierarchy, benefit for MTL) is still quite limited, and we hope for significant developments in the future.
Research Directions
-
Learning what to share.
-
Measurement for similarity of tasks.
-
Using task uncertainty.
-
Introducing asynchronous tasks (feature learning tasks), adopting alternating iterative training.
-
Learning abstract sub-tasks; learning task structures (similar to hierarchy learning in reinforcement).
-
Parameter learning auxiliary tasks.
-
More…
Note: The learning materials for this article mainly come from An Overview of Multi-Task Learning in Deep Neural Networksarxiv.org/abs/1706.0509
References
[1] A Bayesian/information theoretic model of learning to learn via multiple task sampling. link.springer.com/artic
[2] Learning from hints in neural networks. Journal of Complexity doi.org/10.1016/0885-06
[3] Multi-Task Feature Learning doi.org/10.1007/s10994-
[4] Model selection and estimation in regression with grouped variables.
[5] Taking Advantage of Sparsity in Multi-Task Learningarxiv.org/pdf/0903.1468
[6] A Dirty Model for Multi-task Learning. Advances in Neural Information Processing Systems papers.nips.cc/paper/41
[7] Distributed Multi-task Relationship Learning arxiv.org/abs/1612.0402
[8] Regularized multi-task learning doi.org/10.1145/1014052
[9] Discovering Structure in Multiple Learning Tasks: The TC Algorithm scholar.google.com/scho
[10] A Framework for Learning Predictive Structures from Multiple Tasks and Unlabeled Data.
[11] Empirical Bayes for Learning to Learn.
[12] Learning to learn with the informative vector machine doi.org/10.1145/1015330
[13] Task Clustering and Gating for Bayesian Multitask Learning doi.org/10.1162/1532443
[14] Multi-Task Learning for Classification with Dirichlet Process Priors.
[15] Bayesian multitask learning with latent hierarchies dl.acm.org.sci-hub.io/c
[16] Linear Algorithms for Online Multitask Classification.
[17] Learning with whom to share in multi-task feature learning.
[18] Learning Task Grouping and Overlap in Multi-task Learning.
[19] Learning Multiple Tasks Using Shared Hypotheses.
[20] Learning Multiple Tasks with Deep Relationship Networks arxiv.org/abs/1506.0211
[21] Fully-adaptive Feature Sharing in Multi-Task Networks with Applications in Person Attribute Classification arxiv.org/abs/1611.0537
[22] Cross-stitch Networks for Multi-task Learning doi.org/10.1109/CVPR.20
[23] Deep multi-task learning with low level tasks supervised at lower layers.
[24] A Joint Many-Task Model: Growing a Neural Network for Multiple NLP Tasks arxiv.org/abs/1611.0158
[25] Multi-Task Learning Using Uncertainty to Weigh Losses for Scene Geometry and Semantics arxiv.org/abs/1705.0711
[26] Deep Multi-task Representation Learning: A Tensor Factorisation Approach doi.org/10.1002/joe.200
[27] Sluice networks: Learning what to share between loosely related tasks arxiv.org/abs/1705.0814
[28] Exploiting task relatedness for multiple task learning. Learning Theory and Kernel Machines doi.org/10.1007/978-3-5
[29] When is multitask learning effective? Multitask learning for semantic sequence prediction under varying data conditions arxiv.org/abs/1612.0225
[30] Identifying beneficial task relations for multi-task learning in deep neural networks arxiv.org/abs/1702.0830
[31] Multitask learning using uncertainty to weigh losses for scene geometry and semantics.

Recommended Reading:
Learning Notes on Sentence Representation
Common Normalization Methods: BN, LN, IN, GN.
PaddlePaddle Practical NLP Classic Model BiGRU + CRF Detailed Explanation.
