Indoor positioning technology serves as the cornerstone for building a “smart city” where “everything is interconnected,” playing a significant role in both daily life and industrial production. Indoor positioning refers to the ability to determine locations within indoor environments, primarily achieved through the integration of various technologies such as wireless communication, base station positioning, and inertial navigation, forming a comprehensive indoor positioning system. This system enables the monitoring of the location of people and objects within indoor spaces. Researchers have indicated that the foreign market value for indoor positioning technology is expected to reach $41 billion by 2022[1], reflecting an optimistic outlook from industry experts on the development prospects of indoor positioning applications.
RFID-Based Indoor Positioning Prototype System
Figure 1 shows a three-dimensional RFID positioning system called 3D-OmniTrack[2]. This system incorporates a polarization-sensitive phase model, which takes into account the phase changes caused by the angle between the polarization direction of the RFID tag’s antenna and that of the signal-emitting antenna, thereby improving the traditional phase model. The enhanced model can effectively estimate the orientation of the RFID tag while accurately determining the phase.
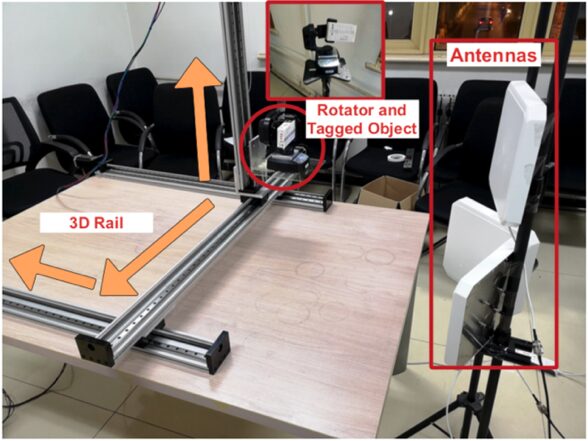
Figure 1 3D-OmniTrack RFID Positioning System
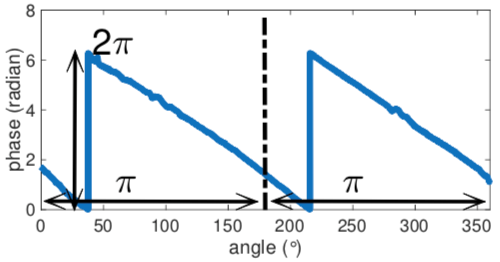
Figure 2 Phase of RFID Tag and Rotation Angle Relationship
From the experiment shown in Figure 2, we can clearly see the impact of polarization on phase. So, what is polarization? For electromagnetic waves, polarization refers to the direction of the electric wave’s vibration. The polarization of an antenna refers to the direction of the electric field of the radio waves it emits. As shown in Figure 3, the antenna polarization of an RFID system can be classified into linear polarization and circular polarization. Linear polarization maintains a fixed direction for the electric field, while circular polarization varies continuously like the hands of a clock on a plane. Typically, to better match the polarization direction of the tag, the antennas connected to RFID readers are circularly polarized antennas.
To more accurately measure the relationship between phase and polarization direction, as shown in the upper part of Figure 3, researchers first express the circularly polarized antenna signal using two orthogonal linearly polarized antenna signals. This allows them to derive the signal propagation model between the two orthogonal linearly polarized signals and the linearly polarized tag, leading to a formula for the phase relationship of the signals. As shown in the lower part of Figure 3, the direction of the circularly polarized signal exhibits periodic variations. Researchers can effectively eliminate the impact of polarization on phase using this method, ensuring that even if the tag rotates, the phase value remains stable.
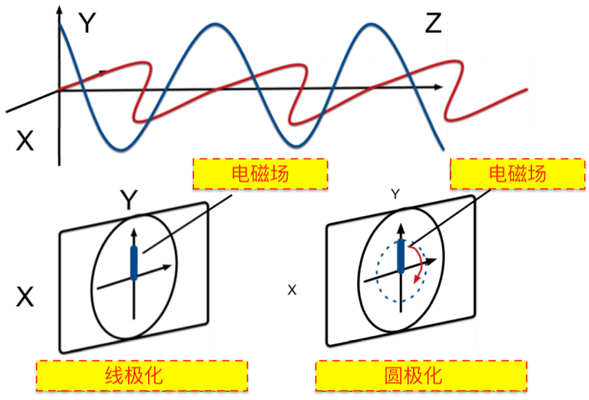
Figure 3 Linear and Circular Polarization
In terms of experimental validation, researchers set up a mobile target platform in a three-dimensional space of approximately 1m3, with movement speeds of 0.1m/s, 0.2m/s, and 0.3m/s, as well as rotation speeds of 0o/s, 10o/s, and 15o/s. The experimental results show that compared to the OmniTrack positioning system, the 3D-OmniTrack positioning system can improve positioning accuracy by up to 60%. Its prototype system is suitable for factory assembly line operations, as shown in Figure 4, where items are transported on a conveyor belt.
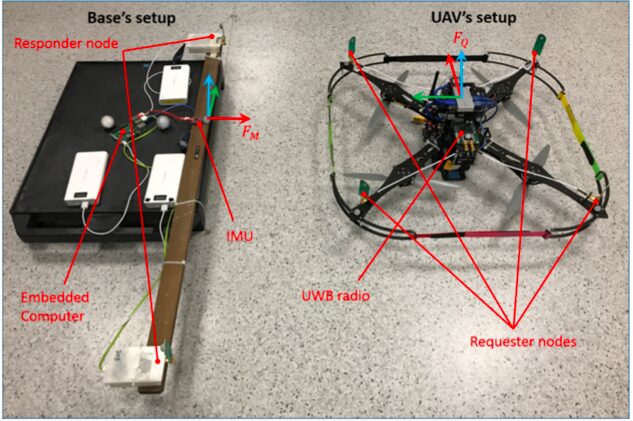
Figure 4 Assembly Line Production Line
Multi-Source Fusion Indoor Positioning Prototype System Based on Ultra-Wideband and Inertial Sensors
With the increasing use of robots such as UGVs (Unmanned Ground Vehicles) and UAVs (Unmanned Aerial Vehicles) in production and daily life, achieving cooperative movement between UGVs and UAVs, allowing them to autonomously determine their relative positions to other robots, will elevate automation to a more intelligent level.
Researchers conducted tests in a 4m*4m experimental area at heights of 0.6m, 0.9m, and 1.2m. The experimental results indicate that the system has a maximum error of 25cm in three-dimensional spatial directions, demonstrating good positioning accuracy.
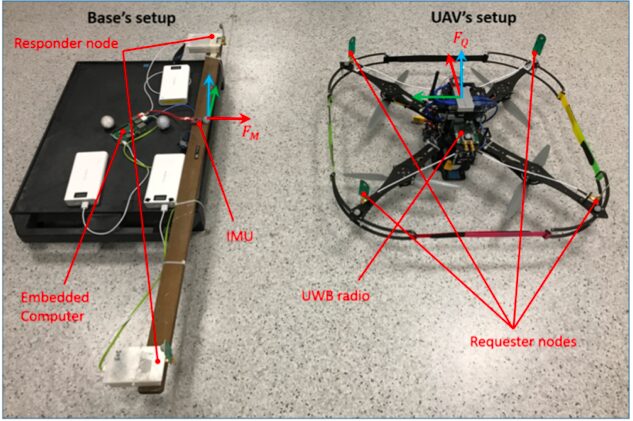
Figure 5 Target Relative Positioning System Based on Ultra-Wideband Ranging and Communication
Conclusion
Compared to single-type sensors, multi-source sensor fusion positioning methods are more favored by researchers. This approach leverages the capabilities of different sensors to avoid the shortcomings of single-type sensors during the positioning process. In addition to the combination of ultra-wideband and inertial sensors described in this article, some researchers are also combining ultra-wideband and other wireless sensors with visual sensors to compensate for the inability of visual sensors to function in non-line-of-sight and low-light conditions. However, this brings about cost issues; how to achieve high-precision positioning under controlled costs remains a goal of continuous exploration in academia and industry. In the future, in addition to assembly line transportation and warehousing environments, indoor positioning will also be used in scenarios such as library inventory, monitoring personnel in nursing homes, and locating vehicles in parking lots, effectively changing people’s production and life.
References
[1] Research and markets[EB/OL]. 2019. https://www.researchandmarkets.com/search.asp?
query=indoor%20location&NoSpellCheck=True&IsAWebsiteInitiatedSearch=True.
[2] Jiang C, He Y, Yang S, et al. 3D-OmniTrack: 3D tracking with COTS RFID systems[C]//2019 18th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN). IEEE, 2019: 25-36.
[3] Jiang C, He Y, Zheng X, et al. Orientation-aware RFID tracking with centimeter-level accuracy[C]. information processing in sensor networks, 2018: 290-301.
[4] T. Nguyen, A. Hanif Zaini, C. Wang, K. Guo and L. Xie, “Robust Target-Relative Localization with Ultra-Wideband Ranging and Communication,” 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, 2018, pp. 2312-2319, doi: 10.1109/ICRA.2018.8460844.
China Confidential Association
Scientific and Technological Branch
Scan to follow us

Author: Zhao Bobai
Editor: Yan Jie
Top 5 Highlights from Previous Articles
The Top-Level Architecture Behind US Cyber Espionage Capabilities
An Overview of the US Cybersecurity System Architecture
Uncovering the USB Device Attack Technology that Breaks Physical Isolation
Using Power Lines to “Handle” Physically Isolated Computers
Note: Speakers and Headphones Can Also Eavesdrop! — Mosquito Attack Technology
Recent Notable Articles
Fiber Optic Eavesdropping and Protection
A Review of Intrusion Detection and Response Models Based on Game Theory
Optical Information Encryption Technology
Preliminary Analysis of the US NIST Special Publication 800-161 on Supply Chain Risk Management Practices for Federal Information Systems and Organizations
US Recommendations for Security in Critical Infrastructure Amid COVID-19