Originally, I only planned to write about AP+MCU (Media), but due to various inquiries on Weibo and Knowledge Planet regarding the pin definitions and related function allocation of the motor controller, I decided to open a new article to organize the pin definitions and related function allocation of the Tesla Model 3 motor controller.
The Model 3 comes in single and dual motor versions, where the rear and front motor controllers have a master-slave relationship in the dual motor version; the rear motor controller acts as the master (DI, Drive Inverter Master) and the front motor controller as the slave (DIS, Drive Inverter Slave), let’s take a look at each.
1. Rear Motor Controller DI
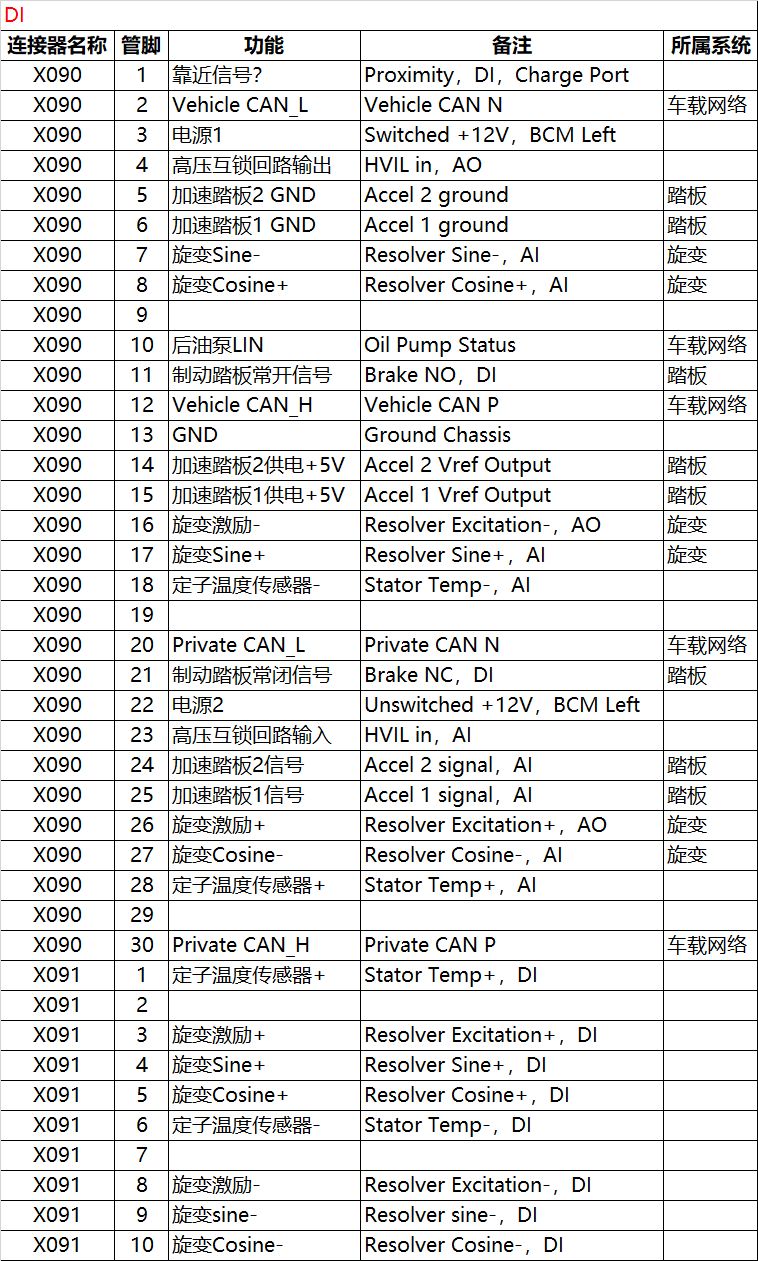
Figure 1: Pin Definitions of the Model 3 Rear Motor Controller
2. Front Motor Controller DIS
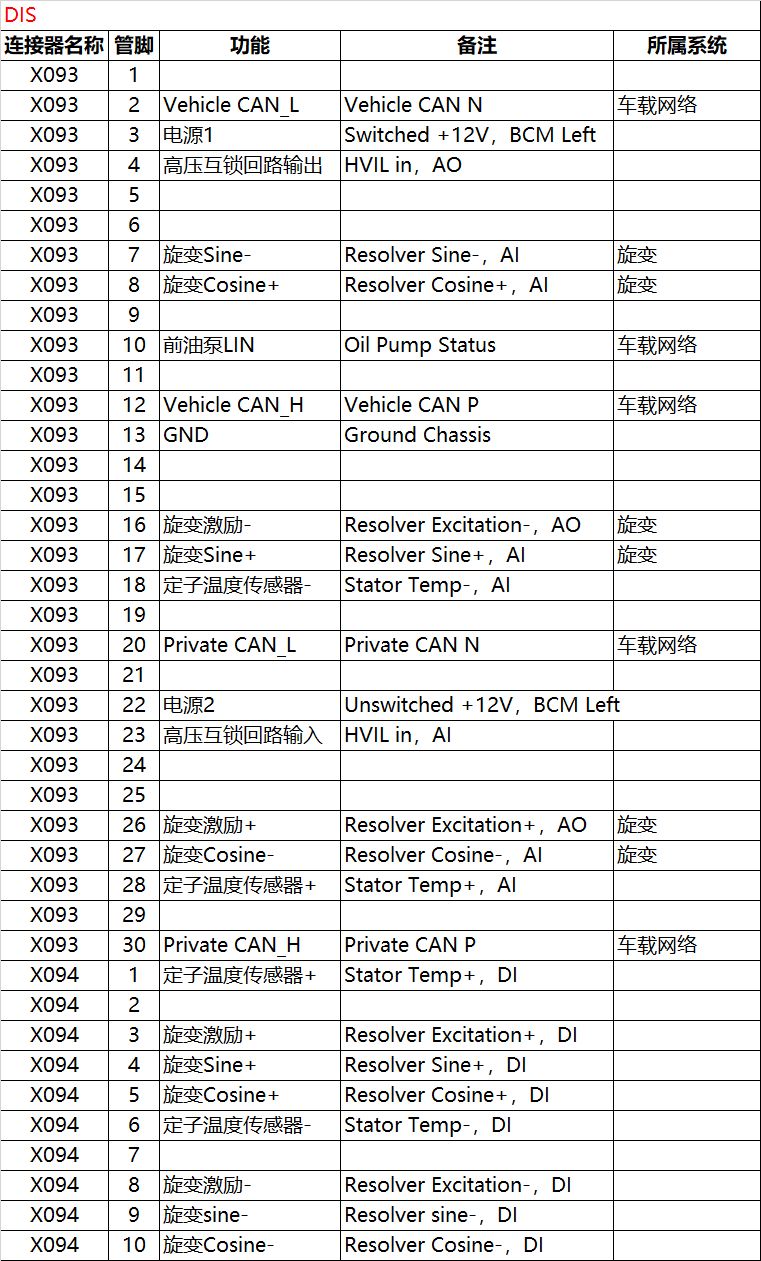
Figure 2: Pin Definitions of the Model 3 Front Motor Controller
The interfaces of the motor controllers are relatively clear and concise: in-vehicle network, resolver signals, stator temperature collection, and the additional pedal signal collection from the rear motor compared to the front motor—this means that the ‘traditional’ VCU’s pedal monitoring is integrated into the rear motor control; we have reason to believe that the rear motor undertakes part of the functions of the ‘traditional’ VCU. Based on this and the currently known signals sent by DI,
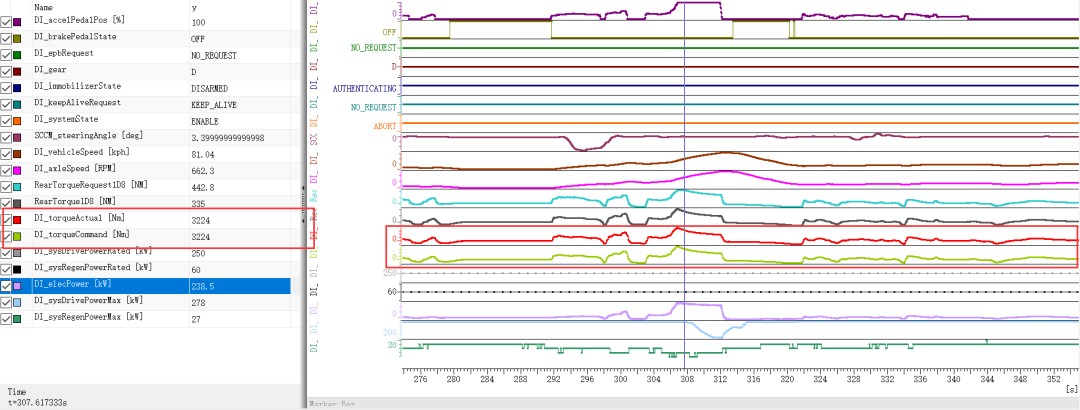
Figure 3: Known Torque Signals from Vehicle CAN (Normal Driving Conditions), note that the last two torque values only share the same trend
A reasonable assumption is that the rear motor controller completes the required torque calculation and torque distribution.
If we want to explore and confirm more functional attributions, we need to rely more on signal interactions, so let’s make an attempt.
1. Gear Demand Analysis
All Tesla models are equipped with a gear lever, which is an ECU node that sends out physical gear positions, while DI completes the vehicle’s logical gear judgment and output;
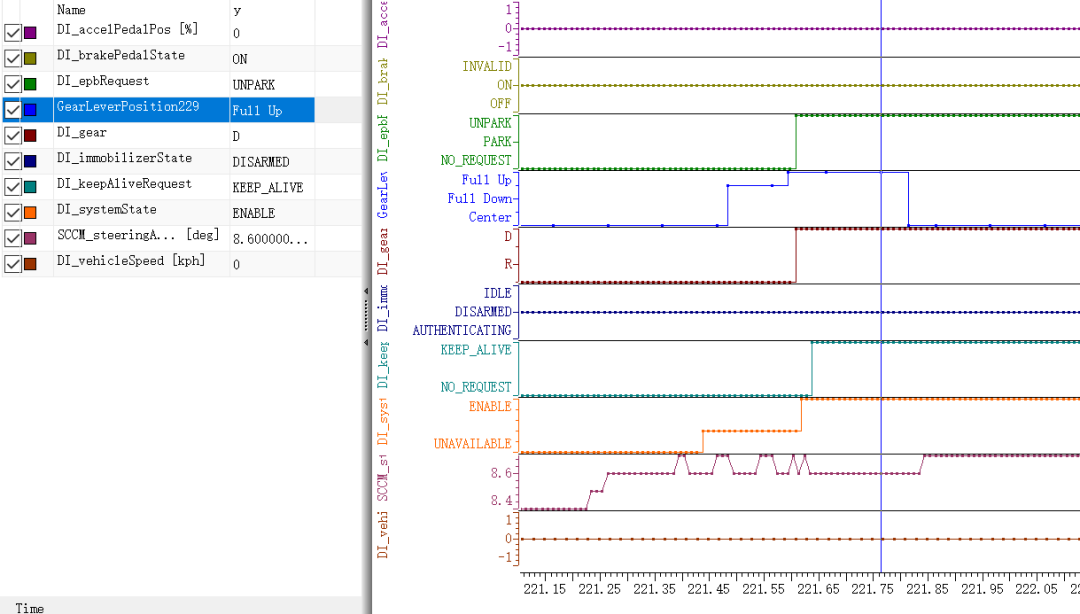
Figure 4: Analysis of Message Signals during Tesla Gear Shifting
2. The issue of pedal monitoring is not significant; acceleration demand and speed control are likely completed by DI, a weak reason being that DI sends out the vehicle speed (as known);
3. As for other high voltage power on/off and energy management, I personally believe these are more completed within the BMS. If interested, we can discuss this further later.
As usual, if you are interested in the complete pin definitions of the Tesla Model 3 motor controller, you can find me on Knowledge Planet.
Who is the cold winter melon?
A half-baked automotive electronics engineer, a funny dad; an egomaniac, a low-quality content creator.
Welcome to find me on Knowledge Planet, let’s accelerate the transition of automobiles towards electrification/connectivity/intelligence/sharing!
 Related Exciting Recommendations:
Related Exciting Recommendations:
Function Allocation of Tesla Model 3 From Controller Pin Definitions – Autopilot+MCU
Function Allocation of Tesla Model 3 From Controller Pin Definitions – FBCM
Function Allocation of Tesla Model 3 From Controller Pin Definitions – LBCM