Create a project using Multitool 8.2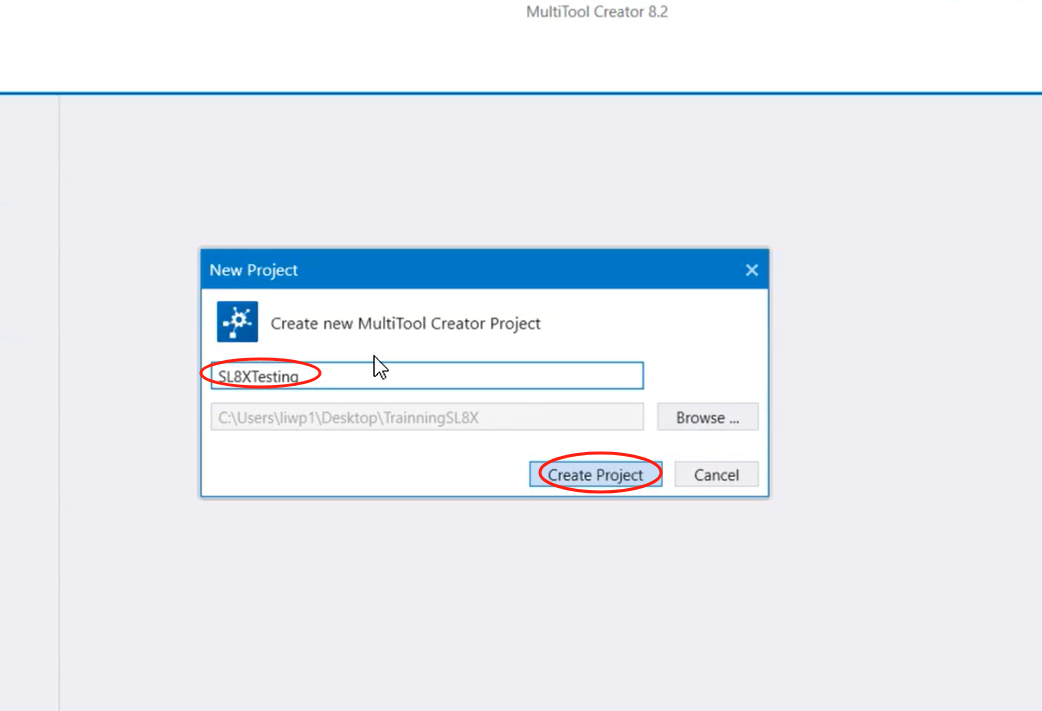 Add an SL8X controller, making sure to select “SL8X1-01” here
Add an SL8X controller, making sure to select “SL8X1-01” here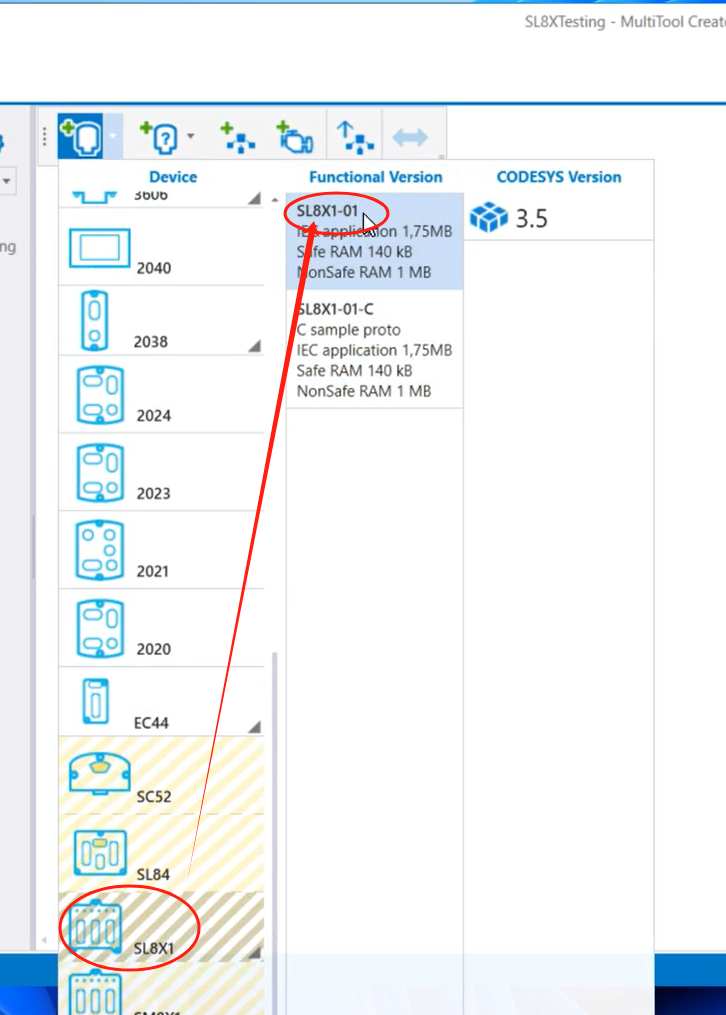 This is not mandatory; I just don’t want to store too many EPEC_CU1 files on my computer.
This is not mandatory; I just don’t want to store too many EPEC_CU1 files on my computer.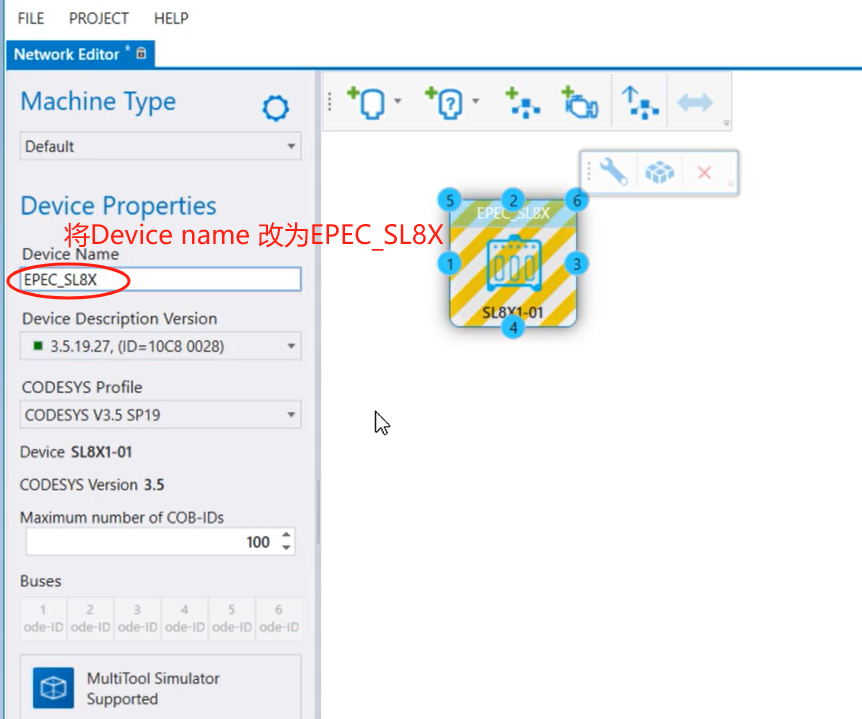 Add a 3724 controller and connect the CAN1 port of the SL8X to the CAN1 port of the 3724 on the same network.
Add a 3724 controller and connect the CAN1 port of the SL8X to the CAN1 port of the 3724 on the same network.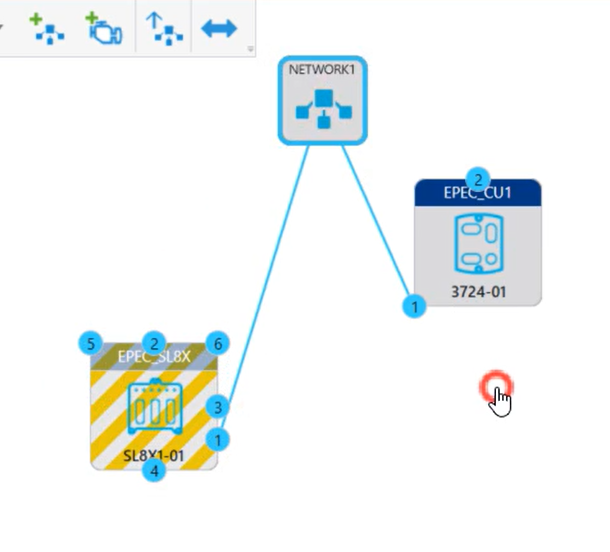 In the CAN settings, set the NMT Protocol to Master.
In the CAN settings, set the NMT Protocol to Master.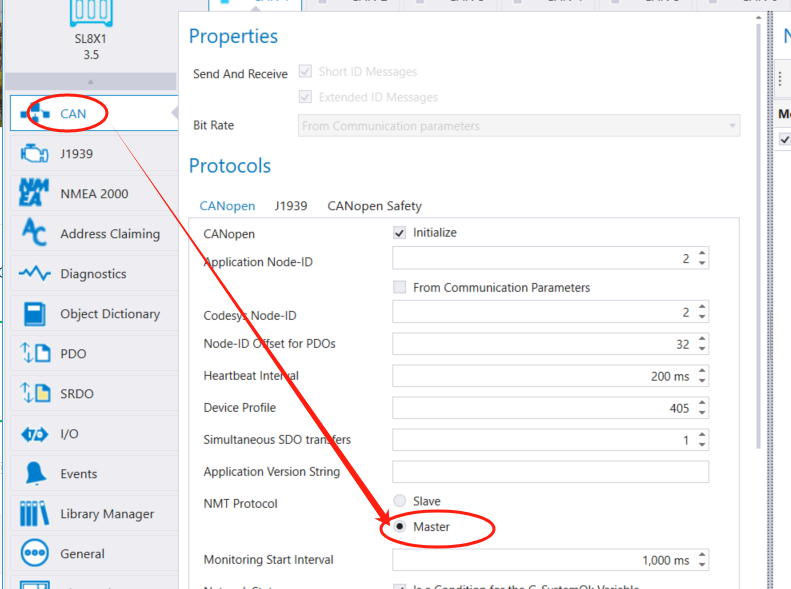 Configure three DINT type parameters for joystick calibration as shown below.
Configure three DINT type parameters for joystick calibration as shown below.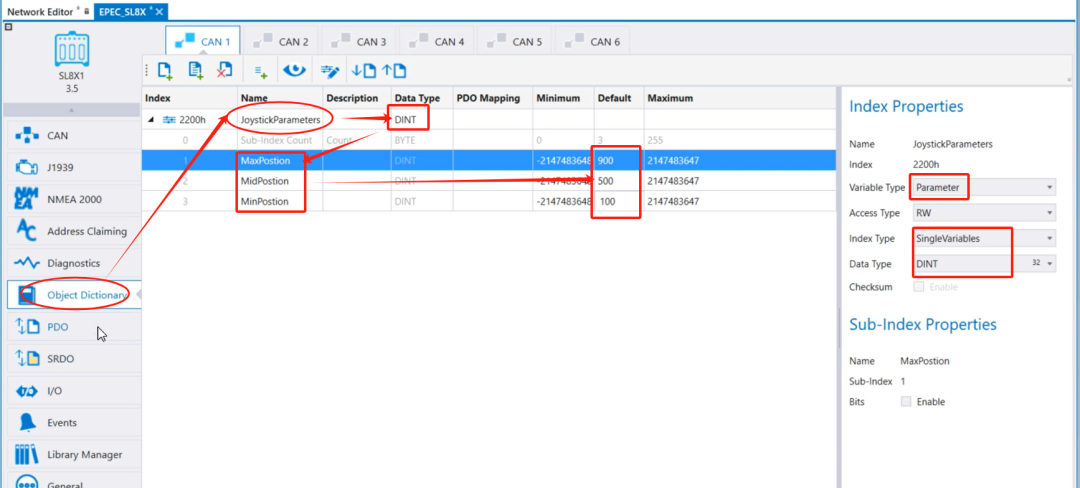 In the SL8X’s TPDO, configure an INT type variable to send to the 3724.
In the SL8X’s TPDO, configure an INT type variable to send to the 3724.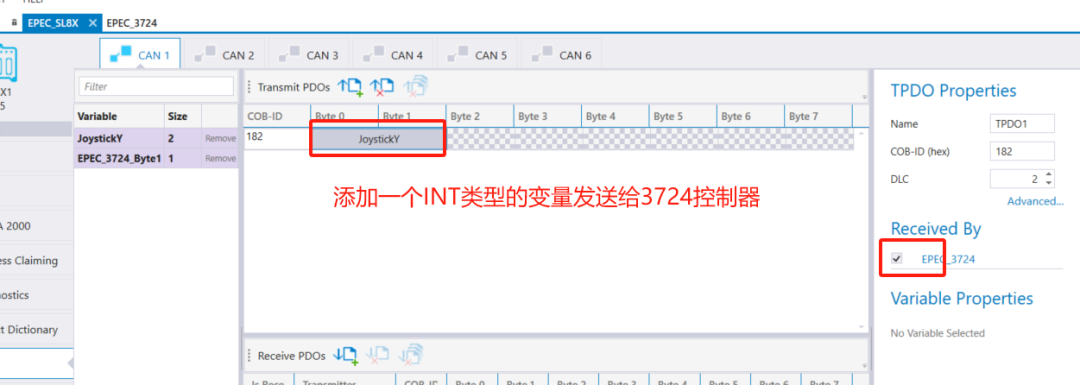 In the TPDO menu of the 3724, also configure a Byte variable to send to the SL8X.
In the TPDO menu of the 3724, also configure a Byte variable to send to the SL8X.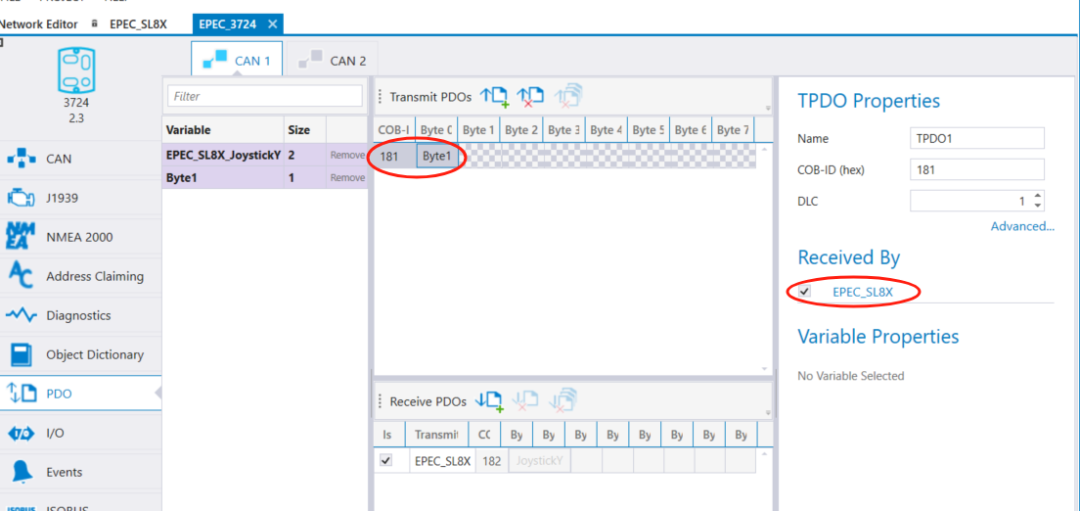 Configure 1.3 as PI 1-ch
Configure 1.3 as PI 1-ch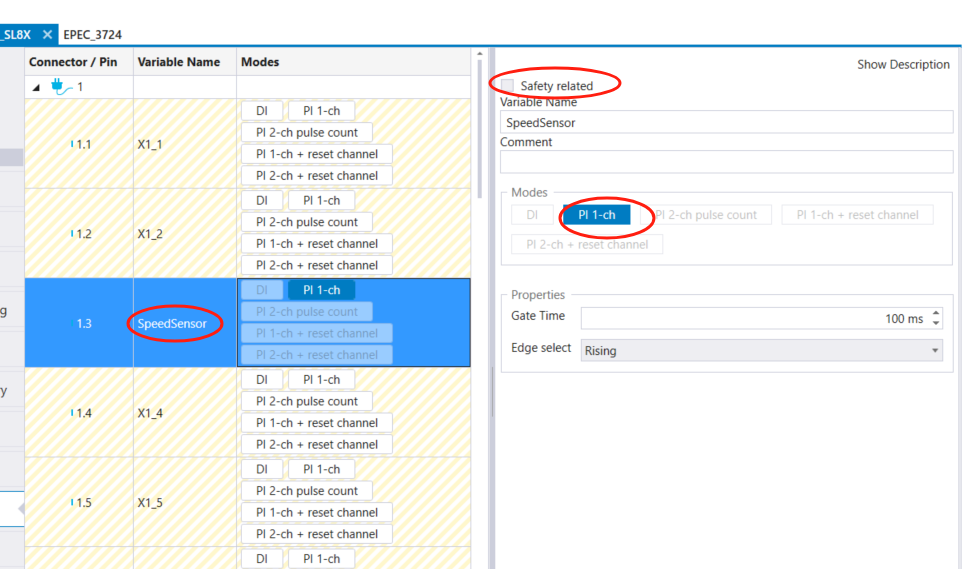 Configure 1.9 as TI
Configure 1.9 as TI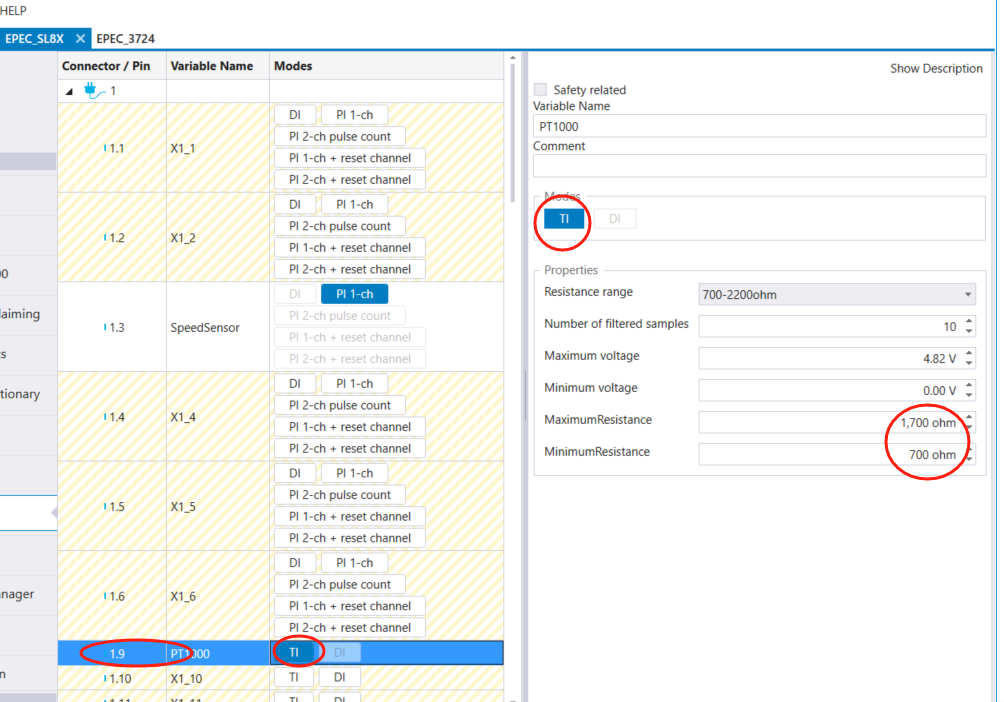 Configure 1.13 as DI
Configure 1.13 as DI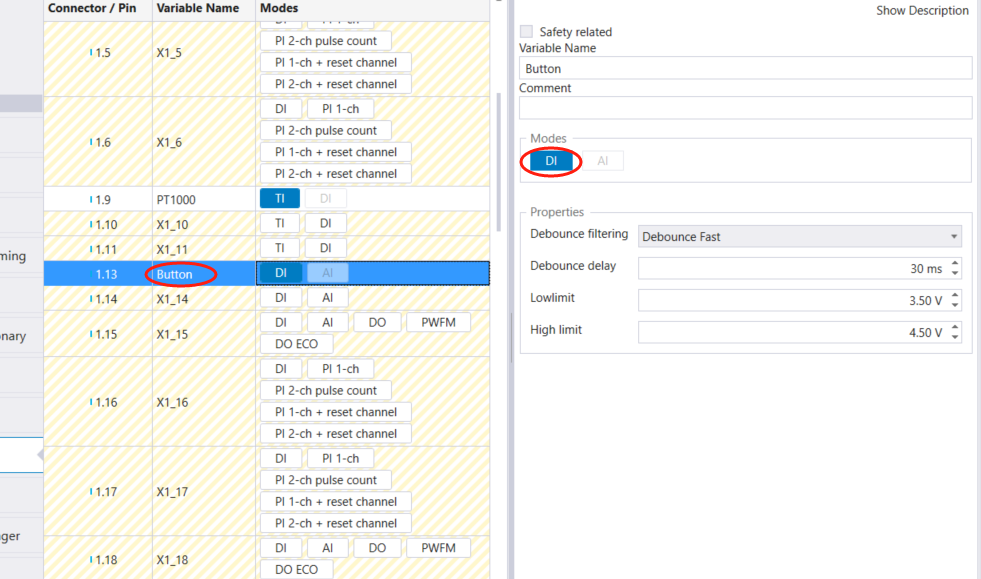 Configure 1.21 as AI
Configure 1.21 as AI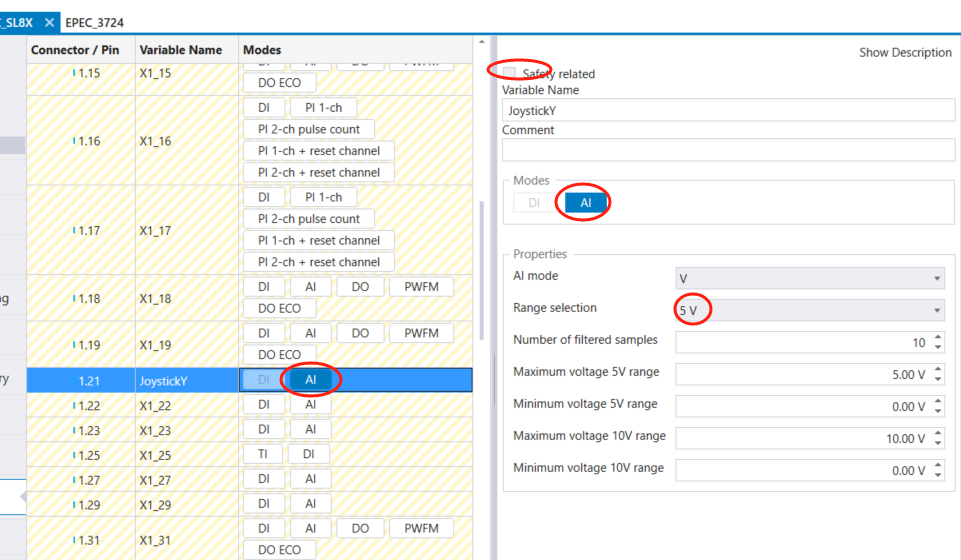 Configure 1.34 as DO ECO
Configure 1.34 as DO ECO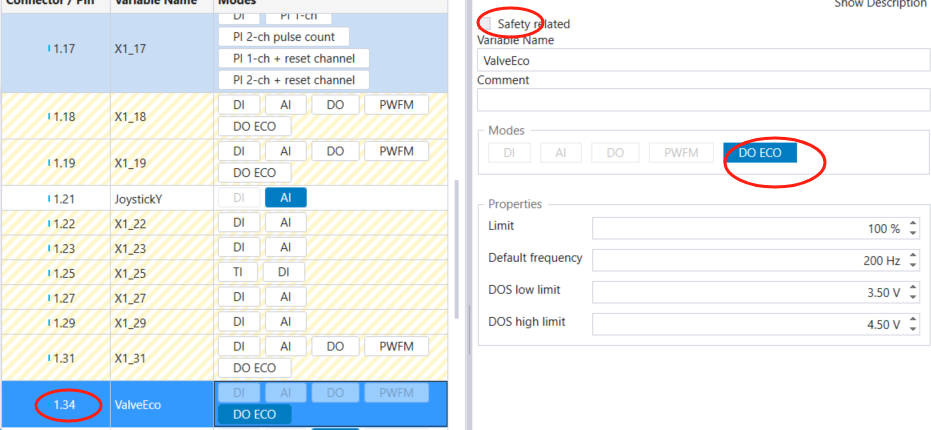 Configure 1.35 as DO
Configure 1.35 as DO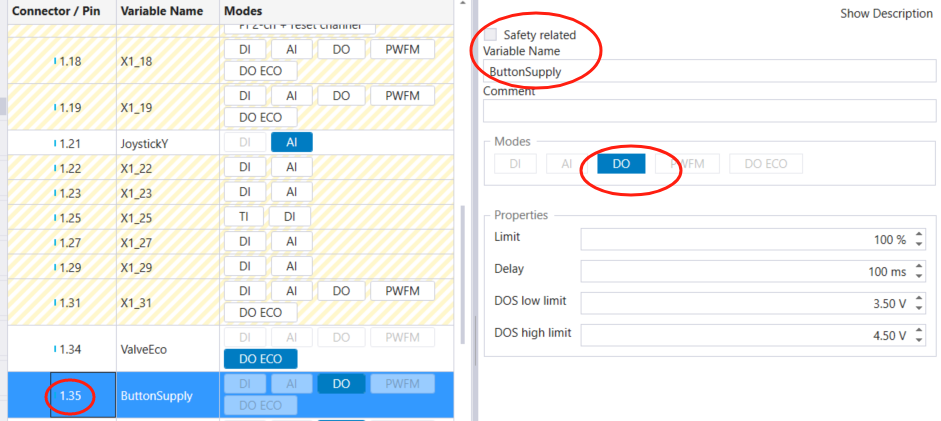 Configure 1.36 as DO
Configure 1.36 as DO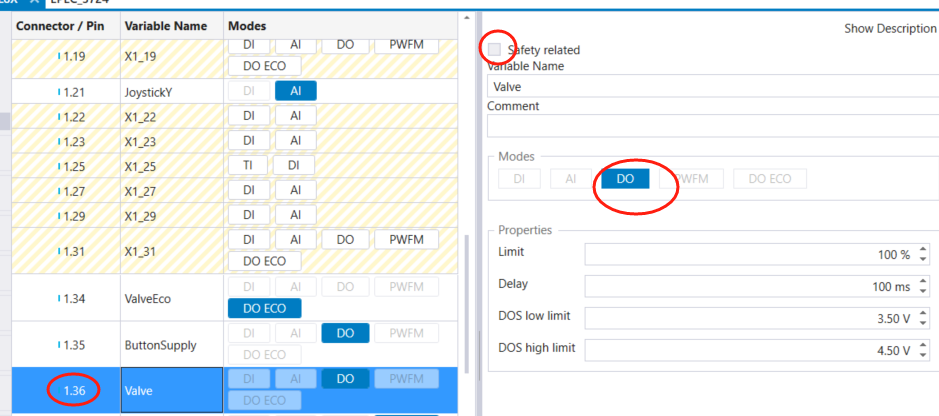 Configure 1.37 as PWFM
Configure 1.37 as PWFM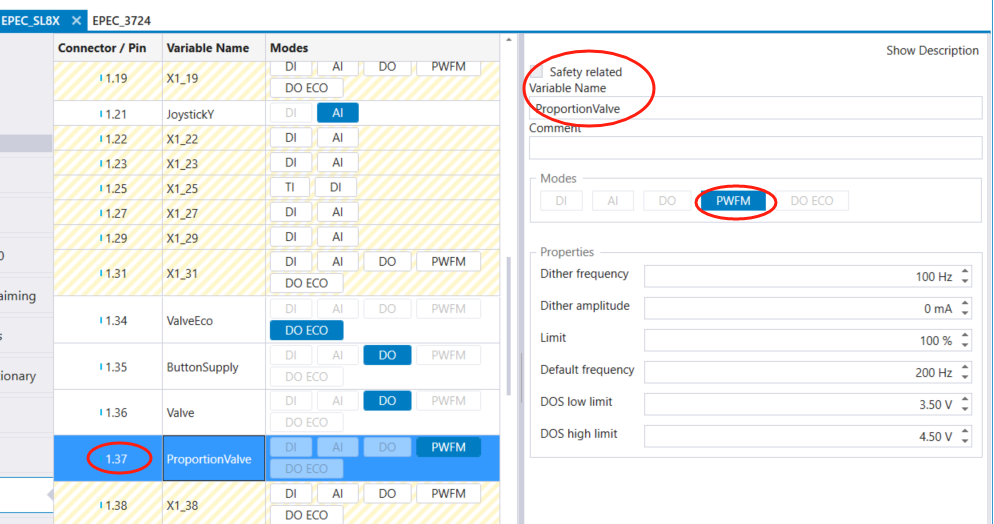 Configure 3.19 and 3.20 as PI 2-ch
Configure 3.19 and 3.20 as PI 2-ch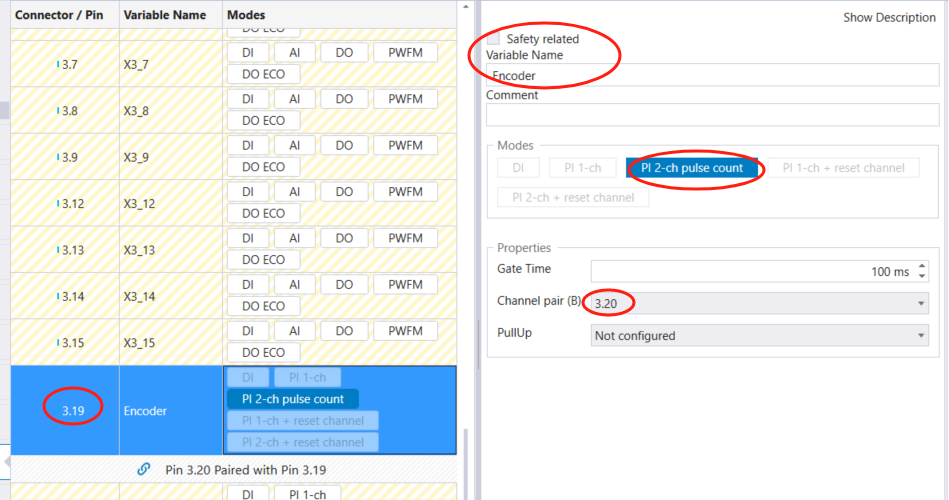 Below is a video of the configuration process
Below is a video of the configuration process