The “2019 China Robotics Industry Annual Conference” will be held on January 9-10, 2019, in Beijing. At the end of the year and the beginning of the new year, industry leaders gather to invite hundreds of top experts, entrepreneurs, and investors to review and summarize the development of the Chinese robotics industry in 2018 and to plan for the development of the industry in 2019, promoting innovation and collaboration in the robotics sector. Come and register to witness together! Click or scan the QR code below for details and registration. Thank you for your support!

Introduction
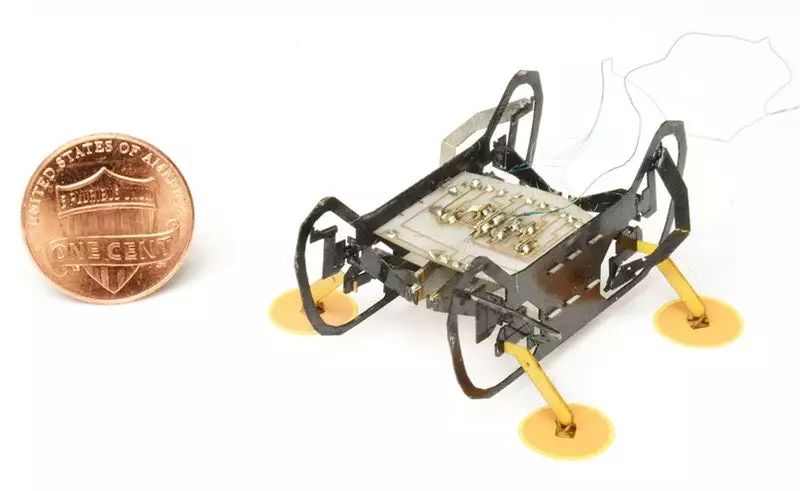
Following the Harvard University soft robotics and Robees bee robot, Harvard University has witnessed the birth of a new robot, which we will introduce today, the all-terrain, no-dead-angle “electroadhesion“ robot—HAMR-E .
Author: Feng Yu Fu Qu
Editor: Xu Xiao Bian
Still, it’s the same Harvard flavor—one on the ground and one in the air.

The editor suggests this should be a love story~
Electroadhesion for Maintenance
Everyone knows that many mechanical devices have extremely complex designs, with countless parts, which is definitely not as simple as disassembling a pencil or a clock when we were kids.

For example, a jet engine contains up to 25,000 parts, and with so many parts, regular maintenance becomes a tedious task, taking a month for each maintenance cycle.

Many components are located deep inside the engine, and without disassembling the machine, inspections cannot be performed, greatly increasing maintenance time and costs. Sometimes, the work from last month isn’t even finished before the new work comes in—it’s really busy!

The birth of HAMR-E is aimed at solving this problem, allowing the robot to delve into the machine and check if the components are functioning properly. But in the complex interior of machines, how can the robot navigate smoothly? The researchers’ solution is simple—let the robot use electroadhesion.
The researchers first created an insulated circular pad using polyimide, then adhered copper electrodes to the pad, allowing a conductive layer to form on the pad when powered, generating electrostatic forces with the machine’s surface. The robot can walk by turning the power on and off.

However, as a small robot, the electrostatic force is very small; the electroadhesive footpad can generate 5.56 grams of shear force and 6.20 grams of normal force, but this is sufficient to prevent a 1.48-gram robot from slipping or falling off its climbing surface.
In addition to the wonders of electroadhesion, researchers also created a new ankle joint for HAMR-E, allowing for three-dimensional rotation to compensate for leg rotation during walking, enabling it to maintain its direction while climbing surfaces. The joints are made from layered fiberglass and polyimide, folded into an origami-like structure, allowing all leg ankles to rotate freely and passively align with the terrain as HAMR-E climbs.
Finally, the researchers created a special walking mode for HAMR-E, ensuring that three footpads always maintain contact with vertical or inverted surfaces to prevent it from falling or slipping. They then lift one foot from the surface, swing it forward, and reattach it while the remaining three feet stay attached to the surface. Simultaneously, a small amount of torque is applied to the raised foot’s diagonal to prevent the robot from drifting away from the climbing surface as it swings its legs. This process is repeated for the other three legs to complete a full walking cycle, synchronized with the electric field switching mode on each foot. This is what it looks like when it walks.
Are you scared yet?
Improvements Needed
Currently, HAMR-E can achieve over a hundred steps without detaching while testing on vertical and inverted surfaces. Its walking speed is comparable to other small climbing robots on inverted surfaces, although slightly slower than other climbing robots on vertical surfaces, it still exceeds the average level.
HAMR-E can also successfully operate around the curved inverted sections of jet engines.
The team is continuing to improve HAMR-E, planning to add sensors to its legs to compensate for the current shortcomings of the footpads, which helps prevent it from detaching from vertical or inverted surfaces. Additionally, HAMR-E’s payload capacity is greater than its own weight, allowing it to carry power supplies, other electronic devices, and sensors to inspect various environments.
Finally, let’s take a look at the official introduction video of this little robot~
Join the Community
The Robotics Lecture Community is now recruiting! If you are engaged in or want to engage in the robotics industry, or want to learn in this direction, you are welcome to join us to discuss cutting-edge robotics technology.
Additionally, we are recruiting for specialized discussion groups on legged robots, medical robots, and industrial robots, and we welcome professionals from these fields to join.
Reply “Discussion Group” in the WeChat public account of Robotics Lecture to get entry details!
Recruiting Authors
The Robotics Lecture is recruiting part-time content creators and columnists.
Please send your resume and original works to: [email protected]
We have no requirements regarding profession or location, and we welcome interested and capable friends to join!
END